
(gefördert durch DFG, 2017-18)
Knowledge about the bathymetry of water bodies is of high economic, social, and ecologic importance. Whereas charting bathymetry for navigational purposes is indispensable for ensuring safe shipping traffic, monitoring the quantity and quality of fresh water resources gains more and more importance, especially in the light of climate change. In the European context, three water related directives, namely the water framework directive (2000), the flood directive (2007), and the Fauna-Flora-Habitat directive (1992), request monitoring in a periodic cycle. Repeat acquisition of rivers and other inland water bodies is one of the essential tasks in fulfilling the above directives and requires efficient techniques for capturing bathymetry. The same applies to the coastal zone with applications in shore protection after storm events, monitoring of benthic habitats, etc.
Echo sounding is still the prime technique for capturing bathymetry. However, ship-borne sonar data acquisition is inefficient and even hazardous in shallow water areas. For surveying the bottom of the shallow riparian area, active and passive optical remote sensing techniques are employed. Three different approaches are in use: (i) Spectrally based depth estimation based on multi-spectral images, (ii) multi-media photogrammetry based on stereo images, and (iii) airborne laser bathymetry. Whereas the prior two are passive techniques using the reflections of solar illumination, the latter is an active method based on green laser radiation.
Exploiting the potential benefits of fusing concurrently acquired data from either data source (i.e. images and laser scans) is the topic of the German Research Foundation (DFG) project “Bathymetry by fusion of airborne laser scanning and multi-spectral aerial imagery” that is work-in-progress at the Institute for Photogrammetry (IfP), Stuttgart (project start: January 2017).
Modern airborne bathymetric sensors (e.g. Riegl VQ-880-G, Teledyne Optech CZMIL Nova, Leica/AHAB HawkEye III, etc.) incorporate laser scanners and multi-spectral cameras. This opens the floor for joint data processing of simultaneously acquired active and passive remote sensing data. Therefore, the following research topics are currently addressed at the IfP with the above-mentioned DFG project:
- Spectrally based depth estimation, through-water photogrammetry, and airborne laser bathymetry are used exclusively so far. It is expected that exploiting the complementary measurement techniques will result in more accurate, reliable, and complete Digital Terrain Models (DTM) of the submerged topography.
- Airborne Laser Bathymetry (ALB) is a monochromatic measurement technique operating in the green domain of the electro-magnetic spectrum. Especially for clear water, certain bands of multi-spectral or even hyper-spectral data may provide better water column penetration. This especially applies to the lower wavelength boundary of the visible spectrum (coastal blue-blue, λ=430-500 nm).
- Depths derived from ALB constitute optimum reference data for calibrating models for spectrally based depth and/or substrate type estimation. This enables automated procedures for processing multi-spectral image data.
- The main advantage of ALB is that the derivation of depth relies on round-trip time measurement of a laser pulse and is, thus, independent from radiometric information (signal strength). Knowing the water depth reduces the unknowns for spectrally based techniques, which helps to distinguish substrate soil types, benthic habitats, etc. Fusion of passive image data and active laser scans should therefore improve the object classification (sand, gravel, rock, submerged vegetation, etc.).
- Existing state-of-the-art techniques like Conditional Random Fields can incorporate contextual information. Extending these techniques for the use with comprehensive active and passive remote sensing data as input should lead to better classification results.
- Whereas the laser footprint diameter fundamentally limits the spatial resolution of laser bathymetry, a much higher resolution in the range of the ground sampling distance of a single image pixel is achieved with Dense Image Matching. Embedding DIM in a multimedia-photogrammetry framework could potentially increase the DTM resolution of the littoral zone.
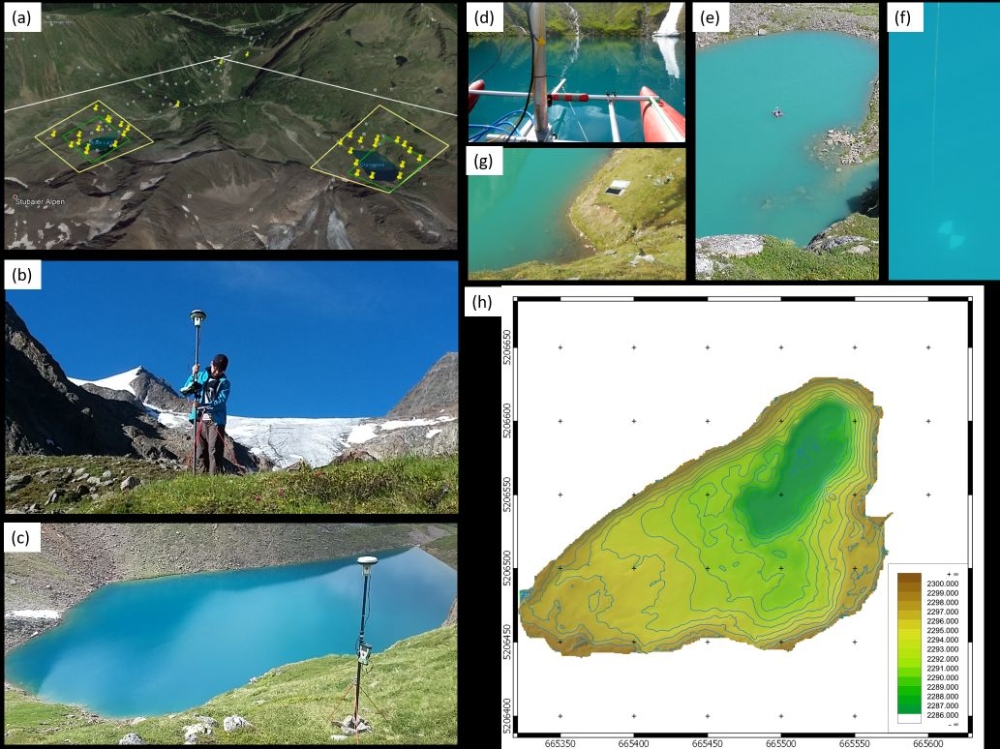
Following a literature research and an inspection of available laser and image data (coastal zone: German Baltic Sea; inland running waters: Pielach River, Austria), one of the main project activities in 2017 was planning and conducting a data acquisition campaign in the Stubai Alps (Tyrol, Austria). For this project, the IfP teamed up with the Unit of Hydraulic Engineering, University of Innsbruck (UIBK). The company Airborne Hydro Mapping (AHM) was commissioned to conduct a flight with a bathymetric laser scanner (Riegl VQ-880-G), a RGB camera (Hasselblad, 39 MP) and a separate Colour Infrared (CIR) camera for capturing two mountain lakes at the foothill of the Stubai glacier (Grünausee and Blaue Lacke). Both lakes are about 12 m deep. In a first campaign in July 2017, the UIBK team measured the bathymetry of both lakes with a multi-beam echo sounder mounted on an inflatable dinghy. Within the same campaign, the IfP team (Gottfried Mandlburger, Ke Gong) measured 20 photogrammetric control points with Leica GNSS receivers. The IIGS (Andreas Kanzler, Annette Scheider) thankfully aided the GNSS campaign with equipment and data processing support.
While the lakes featured very clear water in July (Secchi depth Grünausee: >8m), the instable weather conditions prevented flight operation. Airborne data acquisition took place one month later on August 22. Whereas sunny weather and almost no wind provided excellent conditions for the flight, which was still challenging due to the extreme topography with surrounding peaks higher than 3.000 m above sea level, several heavy thunderstorms in the beginning of August had a negative impact on the clarity of the lakes (Secchi depth Grünausee on August 22: 2.4 m). As turbidity is the limiting factor for any optical measurement technique, only the near-shoreline area could be analysed so far. Figure 1 shows impressions and first results from the field campaigns in July and August.
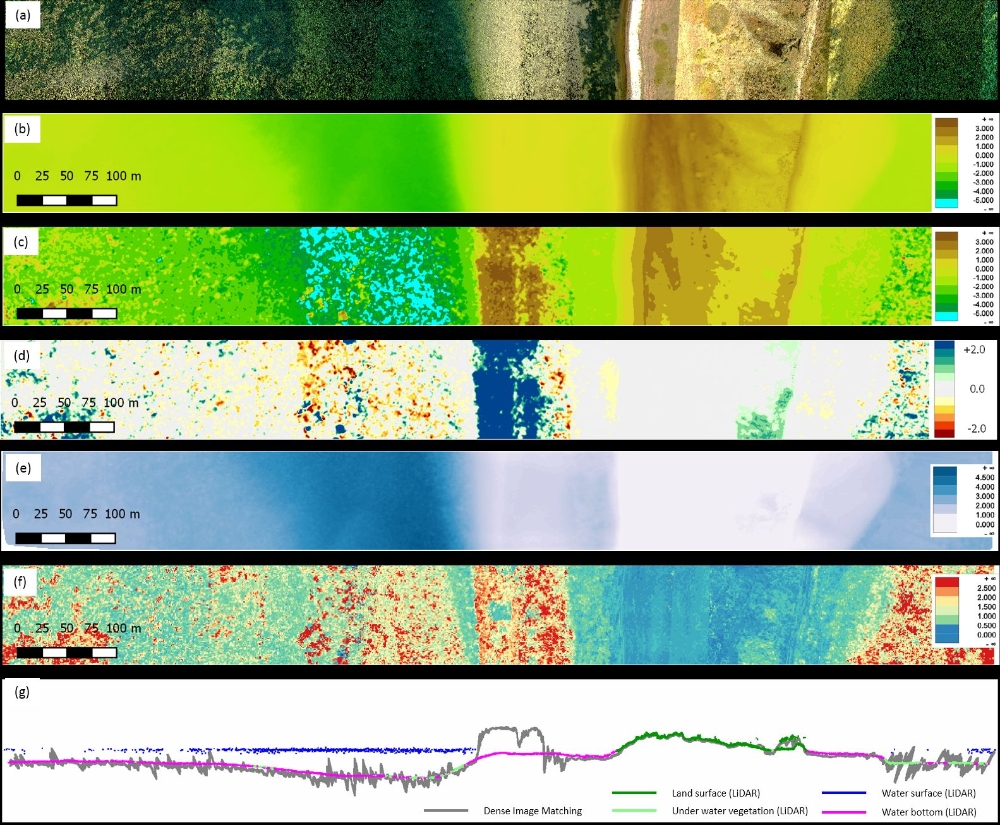
Apart from the Grünausee dataset, data from an existing flight in 2014 at the German Baltic sea, captured with a Leica/AHAB HawkEye III bathymetric laser scanner and an integrated RGBI camera (RCD30, 80 MPix) served as basis for a feasibility study on dense under-water matching. Figure 2 shows the first preliminary results, highlighting that the photogrammetric technique works well in shallow areas with calm water surface and high image texture, but fails in poorly textured areas with undulating water surface. A more sophisticated through-water dense image matching approach is currently work in progress, as are the remaining points from the above list of research topics.

Uwe Sörgel
Prof. Dr.-Ing.Director of the Institute