A large variety of systems for the mapping and interpretation of outdoor environments can process automatically updated 3D models. However, there is still ongoing research on processing similar models for indoor space. A challenging problem in the field of Building Information Modelling (BIM) is to maintain up-to-date models. Even though, not for every building a BIM model is available, for some of them older laser scanner point clouds are available which can be used as a reference for the comparison with a current model.
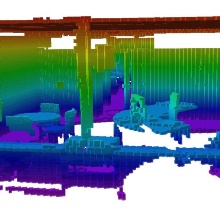
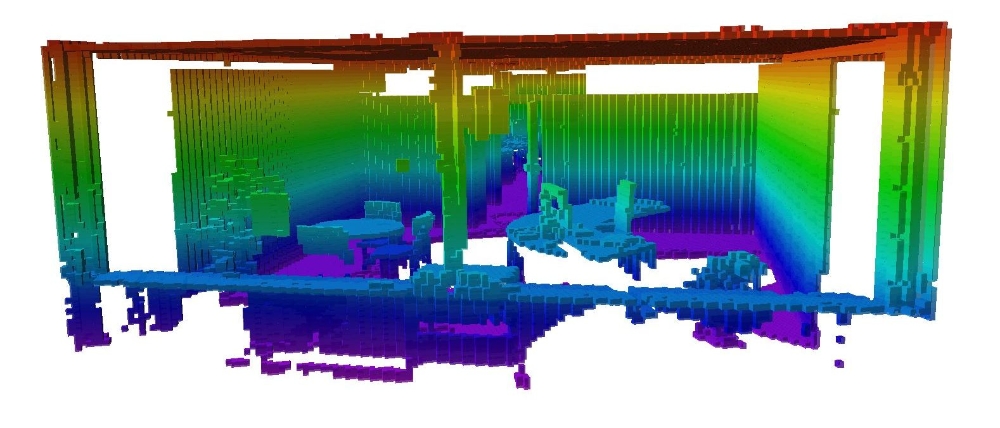
As a first step in automatic detecting of indoor changes, we used an indoor terrestrial laser scanner (TLS) point cloud composed of 31 individual scans. The available scans were saved in an octree structure. Considering the scanner positions, it was possible to use a ray-tracing algorithm in order to differentiate between three different states. Each octree cell is considered to be occupied if there are points inside. The cell is assigned as free if at least one ray is passing through it, or the state is considered to be unknown. Using this structure, it can be further investigated if the model is corresponding with a previous available model. Also the situation can be studied, when further changes occur and we are aware of them and of their approximate location. In this case, a low cost device with a range sensor (like Google Tango) could be used to monitor the changes. The octree structure will allow an update of the corresponding part of the model, by simply changing the state of the corresponding voxels.


Volker Walter
Dr.-Ing.Head of Research Group Geoinformatics