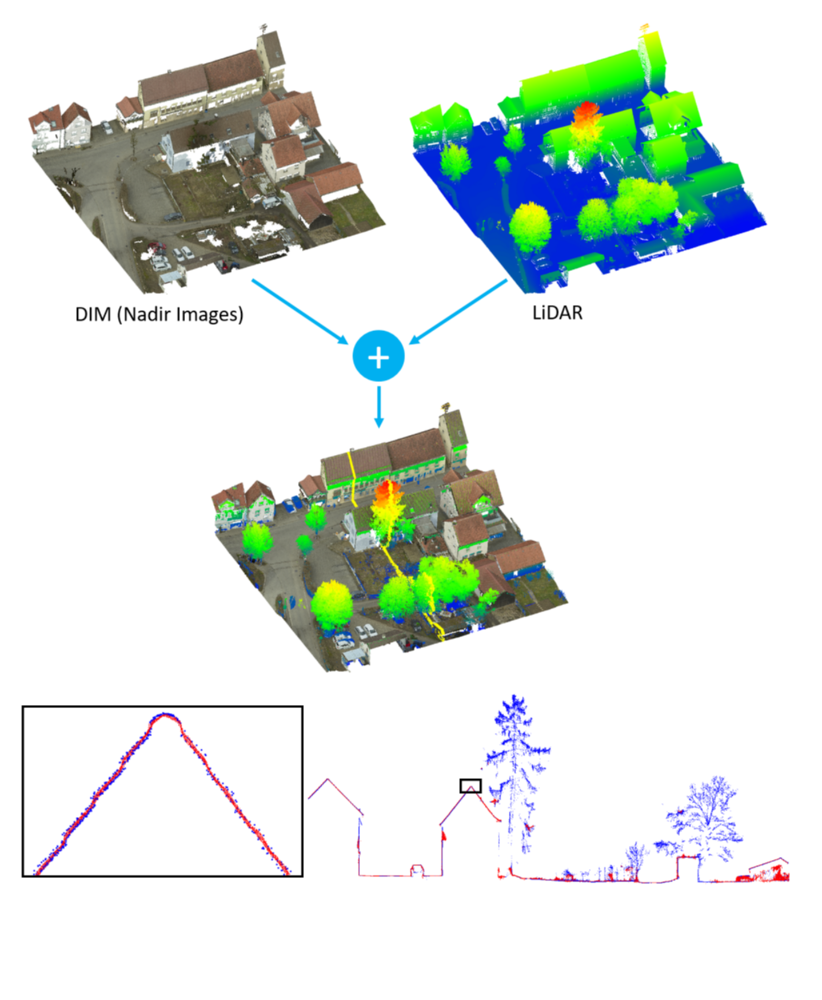
Airborne LiDAR and Multi-View-Stereo-Matching (MVS) originally developed as competing approaches for the generation of dense 3D point clouds representing object geometry. Research efforts thus mainly focused on the improvement of the individual techniques. One main advantage of MVS is that the resulting geometric accuracy directly corresponds to the Ground Sampling Distance and thus the scale of the evaluated imagery. This allows 3D data capture even in the sub-centimeter range if a proper image resolution is available. However, stereo image matching presumes the visibility of the respective object points in at least two images. This can become a problem for very complex 3D structures. In contrast, the polar measurement principle of LiDAR sensors is advantageous whenever the object appearance changes rapidly when seen from different positions. This holds true for semi-transparent objects like vegetation or crane bars, for objects in motion like vehicles, pedestrians, etc., or in very narrow urban canyons. Another advantage of LiDAR is the potential to measure multiple responses of the reflected signal.
The research project LiDAR_DIM aims on the development of an integrated airborne camera and LiDAR system as well as an integrated data processing with the basic aim to generate high quality textured 3D meshes. , which are enriched by semantic information. is a cooperation between the companies IGI and nFrames and the Institute for Photogrammetry, University of Stuttgart, funded by the German Federal Ministry for Economic Affairs and Energy. It aims on the development of an integrated airborne camera and LiDAR system as well as an integrated data processing with the basic aim to generate high quality textured 3D meshes, which are enriched by semantic information.
{kind=link}
Contact

Norbert Haala
apl. Prof. Dr.-Ing.Deputy Director

Dominik Laupheimer
Dr.-Ing.Research Associate