
SLAM-based Monitoring of Construction Sites
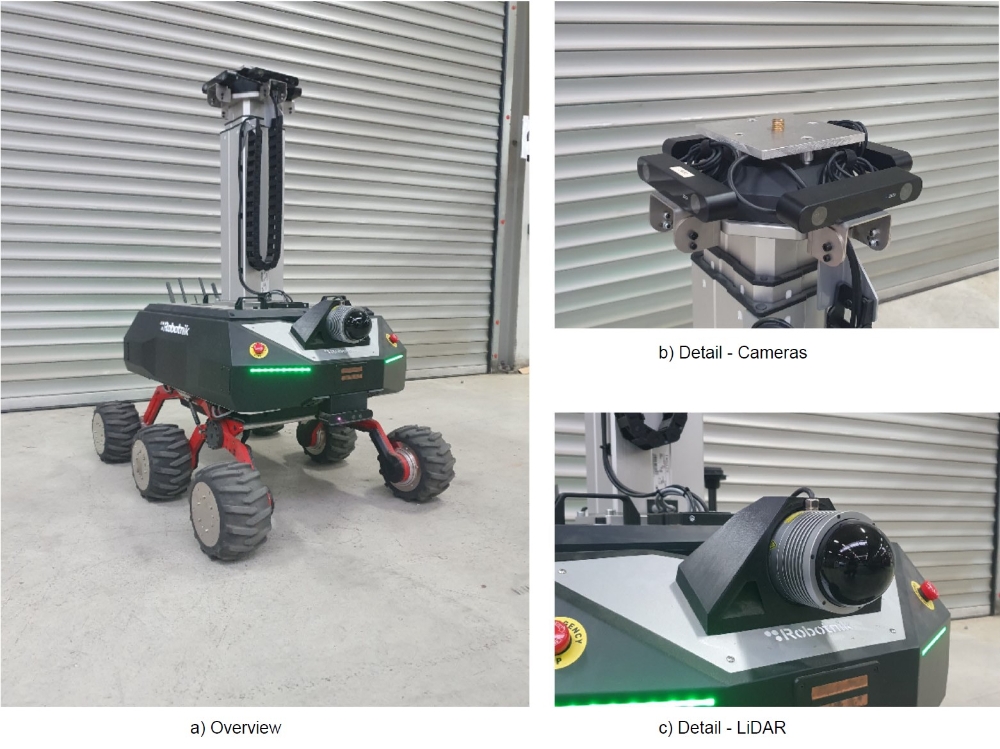
Monitoring construction sites for documentation and planning purposes is an standard application scenario for the geodetic capture of 3D point clouds, which is traditionally realized by Terrestrial Laser Scanning (TLS) from fixed stations. In contrast, our work aims at a SLAM-based approach using an Autonomous Mobile Robot equipped with RGB-D cameras and a laser scanner. This opts for more efficient, flexible and potentially autonomous data collection. The project realized within the cluster of Excellence IntCDC as part of the Research Project AI-Supported Collaborative Control and Trajectory Generation of Mobile Manipulators for Indoor Construction Tasks and Core task is the generation of a Digital Twin of the Large-Scale Construction Robotics Laboratory (LCRL).
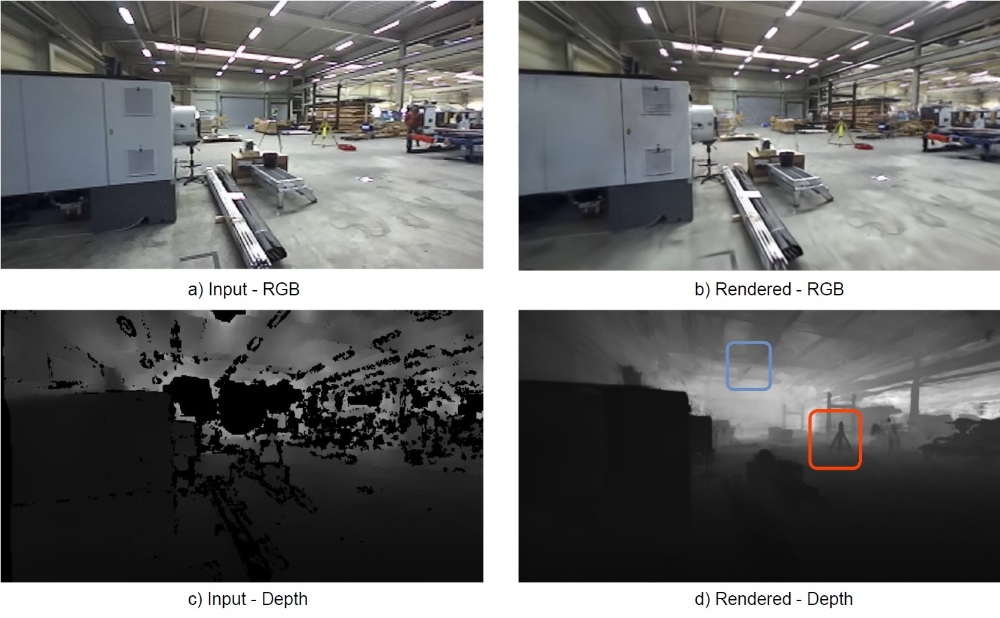
As one important step, a dense 3D representation of the LCLR is derived from the camera poses and the globally consistent LiDAR point cloud by combining suitable SLAM-based approaches. As one application, we generate a representation by 3D Gaussian Splatting to render realistic images and depth maps at arbitrary viewpoints. This can subsequently be used for tasks like first-person navigation. This is demonstrated by the comparison of the image and depth map captured from our stereo camera on board of the robot to the view rendered at the same pose. While the stereo depth on the left suffers from incompleteness due to issues like low texture or limited stereo baseline, the depth images rendered using the trained 3D Gaussian model address these difficulties effectively, producing fully complete depths with clearer object borders.
References
Haala, N.; Zhang, W.; Joachim, L.; Skuddis, D.; Abolhasani, S.; Schwieger, V. & Soergel, U. [2023] Zum Potenzial von SLAM-Verfahren für geodätische Echtzeit-Messaufgaben. Allgemeine Vermessungsnachrichten (avn), 163–172.
URL: https://gispoint.de/artikelarchiv/avn/2023/avn-ausgabe-052023/7879-zum-potenzial-von-slam-verfahren-fuer-geodaetische-echtzeit-messaufgaben.html
Reß, V.; Zhang, W.; Skuddis,D.; Haala, N.; & Soergel, U. [2024] SLAM for indoor mapping of wide area construction environments to be published ISPRS Annals TC II. arXiv:2404.17215
Contact

Norbert Haala
apl. Prof. Dr.-Ing.Deputy Director

Vincent Reß
M.Sc.Research Associate