
If 3D building reconstruction is realized from aerial data, the geometric representation of facades is usually limited to planar structures. In order to automatically add 3D geometries to such planar facade polygons a grammar supported facade reconstruction was developed. The approach is based on 3D point clouds from a land-based mobile mapping system. The following figure depicts LiDAR point clouds collected by the commercial StreetMapper system. Such systems combine mapping sensors like multiple CCD cameras and/or laser scanners with navigation components like GNSS (Global Navigation Satellite Systems) and Inertial Measurement Units (IMU). For the given example, 3D points covering facades and the neighboring architecture were measured at densities of 2-5cm at absolute accuracies of 10-20cm.
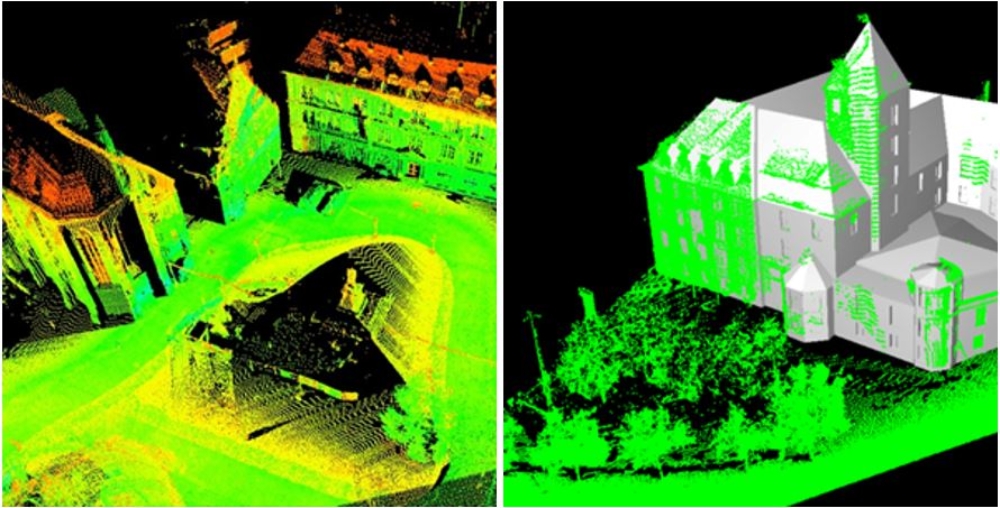
Such dense 3D point clouds are then used to automatically extract windows and doors of the depicted building façades. Since occlusions and oblique views result in strong variations of the sampling distance during data capture, an accurate extraction of the respective features of interest is limited to those parts of the facade with a sufficient amount of point measurements. Such reconstructed parts of the facades are then used to detect dominant or repetitive features and regularities, which infer a so-called facade grammar. This grammar contains all the information necessary to produce facades in the style of the respective building. Since the inference process is restricted to densely measured areas, a facade grammar of good quality can be provided. This grammar is then used to synthesize facade regions where sensor data is only partially available or (even) non-existing. By these means, relatively small regions with dense point measurements can be used to generate the original grammar which is then used to predict a complete 3D building model.
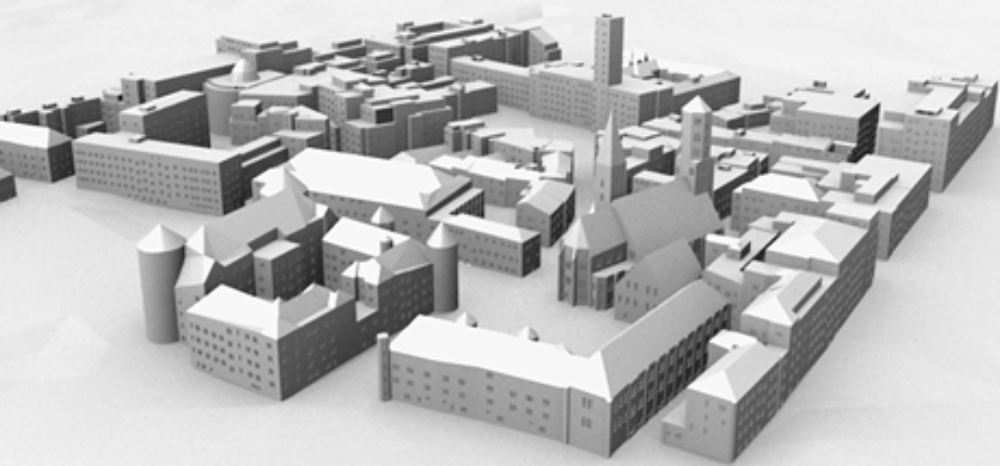
The use of facade grammar is not limited to the completion at areas of insufficient data quality, it also provides a “library” to generate facade structures for building objects, where no measurement is available at all. In the example, a variety of grammars was derived in advance from a few buildings in the near environment and then used to enrich the 3D city model of larger scene with facades of compatible architectural styles.

Originally, the collection of area-covering 3D point clouds from mobile mapping systems required the use of LiDAR sensors. Meanwhile, dense stereo image matching alternatively allows for an efficient and accurate 3D data capture using camera-based systems. An exemplary result of such an image based approach is depicted above. Since such point clouds provide both geometric and radiometric information, a further improvement of the automatic façade reconstruction is feasible.
References
Tutzauer, P. & Haala, N., 2015
Facade Reconstruction Using Geometric and Radiometric Point Cloud Information Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XL-3/W2, 247-252,
doi:10.5194/isprsarchives-XL-3-W2-247-2015, 2015
Haala, N., Tutzauer, P., Becker, S., 2015
Automatisierte Erzeugung von LOD3-Modellen aus 3D-Punktwolken durch Multi-Stereo-Bildzuordnung, in Geoinformationssysteme 2015, Beiträge zur 2. Münchner GI-Runde, Wichmann Verlag, pp. 108-119
Becker, S., 2009.
Generation and application of rules for quality dependent facade reconstruction. ISPRS Journal of Photogrammetry and Remote Sensing. ISPRS Journal of Photogrammetry and Remote Sensing 64 (2009) pp. 640-653, DOI: http://dx.doi.org/10.1016/j.isprsjprs.2009.06.002
Becker, S., Haala, N., 2009.
Grammar supported facade reconstruction from mobile LiDAR mapping. ISPRS Workshop on Object Extraction for 3D City Models, Road Databases and Traffic Monitoring, Paris, 3.-4. Sept.

Norbert Haala
apl. Prof. Dr.-Ing.Deputy Director