
The lock Hessigheim is located at Neckar 143.01 km (see Figure 1) and built on unstable ground. Natural underground chambers arise due to eluviation of gypsum in the anhydrite layer. For this reason, the ground submerges continuously. The relative submergence of ground is about 1 mm/a up to 1 cm/a (relative to direct surroundings). The corresponding relative translatory movement is in the range of several mm/a. Absolute submergence is unknown. However, from a monitoring point of view relative movement is sufficient.
We monitor the lock in collaboration with the Bundesanstalt für Gewässerkunde (BfG) and the Amt für Neckarausbau Heidelberg (ANH).
The lock is monitored in a threefold manner:
- Engineer-geodetic monitoring (tachymeter, precise levelling, extensometer, alignment)
- Airborne monitoring (image matching, laserscanning)
- Satellite monitoring (persistent scatterer interferometry)
The objective of the project is to analyze different engineer-geodetic concepts for constructional questions. In particular, we analyze the potentials of area wide, permanent, high-frequency measurements for monitoring the lock.
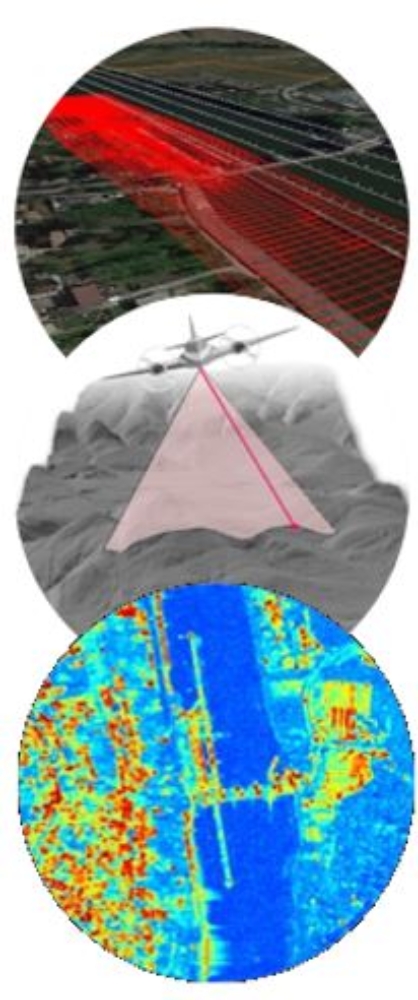
Airborne monitoring (by image matching or laserscanning) and satellite monitoring (by persistent scatterer interferometry) are contactless measuring methods (see Figure on the left). Such remote sensing methods are capable to cover large areas in short time. In case of satellite sensors, temporal monitoring is possible. Depending on the repeat cycle of the satellite (usually between a few days up to weeks), time-series of imagery of high temporal density can be obtained.
Another aim of the project is to prove the efficacy for an efficient area wide high-frequency monitoring regarding a high quality assurance. The subsequent aim is to apply the research findings/the concept to other traffic structures.
Engineer-geodetic monitoring:
Engineer-geodetic monitoring is state-of-the art for highly accurate monitoring. However, the monitoring is only point based and very time-consuming. Furthermore, there are difficult geographic framework conditions at the lock that impede the monitoring. Common measurement tools are tachymeter, precise levelling, extensometer, and alignment.
Airborne monitoring (image matching, laserscanning):
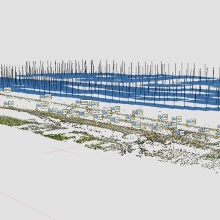
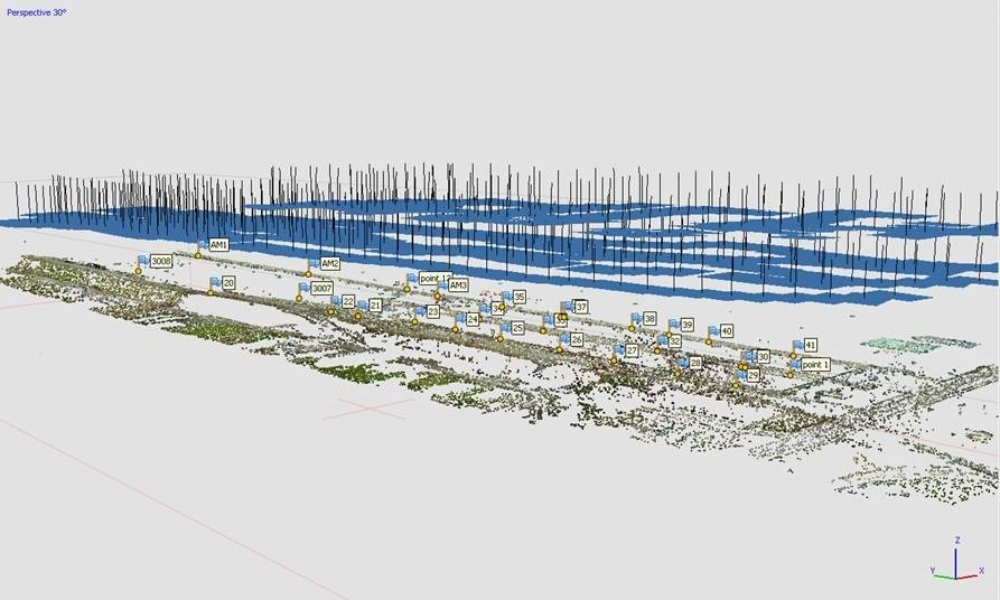
The advantage of airborne imagery and airborne laserscanning is the generation of area wide, high-resolution point clouds. What is more, those points could be attached with semantic information. The standard multi-stereo image processing (matching, 3D reconstruction, DEM generation, generation of true orthophoto) has to be adapted to the challenging water surroundings. The same holds true for the standard laserscanning processing by the Laser Strip Adjustment. We seek to realize a ground sampling distance (GSD) of 3-5 mm and a minimal point density of 4 points per 10 x 10 cm. The combination of both methods generates a dense point cloud for every epoch. These point clouds can be used for generating difference models and, thus, for visualizing relative movements of objects.

Satellite monitoring (persistent scatterer interferometry)
We seek to detect movement of the lock with high accuracy and reliability based on Persistent Scatterer Interferometric Synthetic Aperture Radar (PSInSAR). We rely on TerraSAR-X and Sentinel-1 data. The main idea of Persistent Scatterer Interferometry is to detect pixels with a constant reflective behavior within a stack of radar images. Generally, these pixels correspond to rigid objects with smooth surfaces. Buildings are “natural” persistent scatterers in urban areas. In addition, we mount artificial persistent scatterers near the lock. These so-called corner reflectors (see Figure 2) work like retro reflectors.
First Results:
We achieved object point accuracy of 3-8 mm with our first monitoring flight in January 2018. Figure 3 shows the result of the matching. Figure 4 shows a first evaluation of PSInSAR.
![Figure 4. Left: Relative movement in the area near the lock Hessigheim (by PSInSAR). Red: high submergence, green: low submergence. Right: Accumulated displacement [mm] for one point (based on 33 TerraSAR-X images. Period: 27th November 2014 – 28th December 2015).](https://www.ifp.uni-stuttgart.de/img/forschung/photogrammetrie/monitoring4.png?__scale=w:1000,h:1000,q:100,t:3)

Michael Cramer
Dr.-Ing.Head of Research Group Photogrammetric Systems

Dominik Laupheimer
Dr.-Ing.Research Associate