
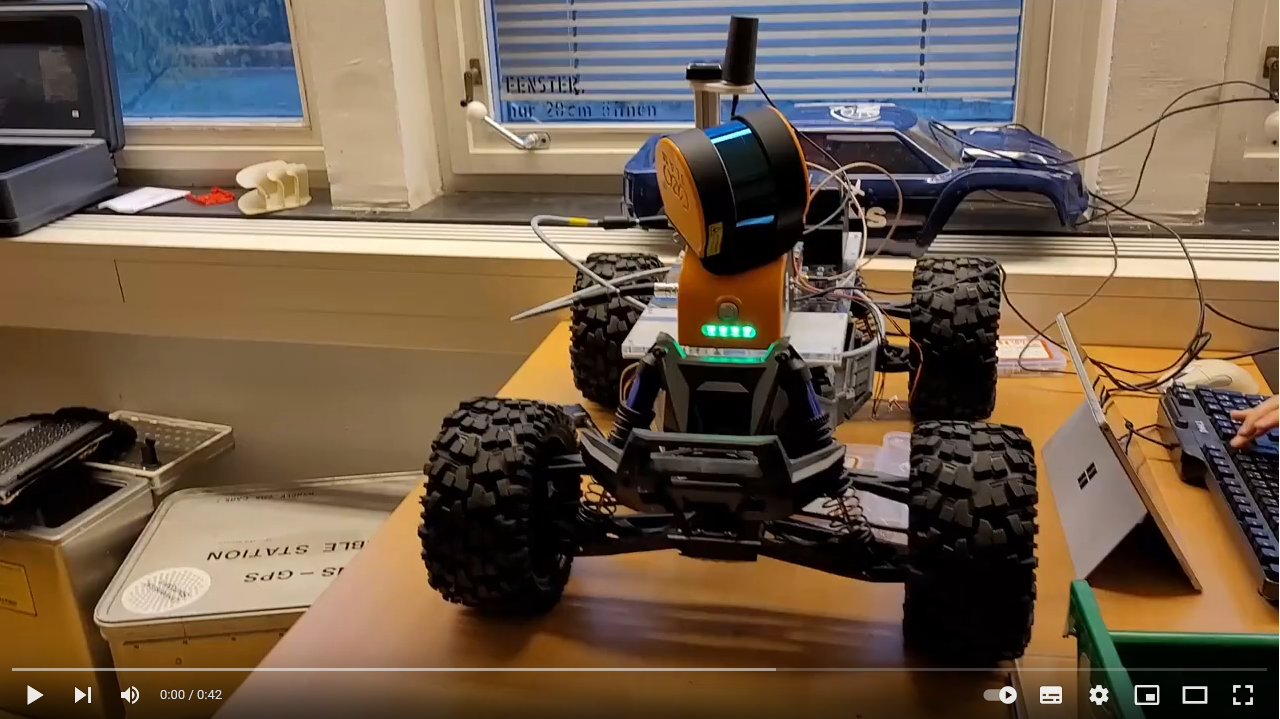
Im Wintersemester 2021/22 wurde unter der gemeinsamen Betreuung des Instituts für Navigation (INS) und des Instituts für Photogrammetrie (ifp) ein ferngesteuertes Mapping-Fahrzeug aufgebaut und zur Erzeugung georeferenzierter Punktwolken mittels SLAM (Simultaneos Simultaneous Localization and Mapping) eingesetzt. Zu diesem Zweck wurde das ferngesteuerte Fahrzeug mit einer GNSS-Antenne, einem ZEB-HORIZON-Laserscanner, einer 360°-Kamera und weiteren Sensorelementen ausgestattet. Ziel war das Scannen der Umgebung mit einer mobilen Plattform, wobei die erfasste 3D-Punktwolke in der Nachbearbeitung georeferenziert und koloriert wurde.
Die Integration der Sensoren auf dem Fahrzeug erfolgte durch eine Halterung, aufgebaut mithilfe eines 3-D-Druckers und Laserschneiden. Die zusätzliche Erfassung von 360-Grad-Umgebungsbilder wurde durch eine auf dem Antennenstativ montierte GoPro Kamera realisiert. Diese Bilder dienten in der späteren Auswertung zur Kolorierung der Punktwolke. Neben den Sensoren wurde auf der Halterung ein Raspberry Pi montiert. Diese zentrale Recheneinheit steuerte die Erfassung aller Sensordaten und kontrollierte die Verbindung der Motorsteuerung und der Bodenkontrollstation mit der Fernsteuerung. Zudem wurde während der Befahrung die GNSS-Antenne abgedeckt. Damit konnte das empfindliche GNSS-Signal vor den elektromagnetischen Feldern geschützt werden, die der Motor des Laserscanners erzeugte.
Ziel des Auswerteprozesses war die Kombination aller Daten aus den zunächst unabhängigen Sensoren. Hierzu erfolgte unter anderem die Messung der Hebelarme zwischen dem Laserscanner, der GNSS-Antenne und der Kamera. Diese Parameter wurden aus dem CAD-Modell der Halterung digital abgegriffen und mit den analogen Messungen am Fahrzeug validiert.

Für die direkte Georeferenzierung wurde zunächst der zeitliche Zusammenhang zwischen den gescannten Punktwolken und den GNSS-Daten mithilfe eines Kreuzkorrelationsansatzes berechnet. Nach dieser Synchronisierung erfolgt die Zuordnung beider Trajektorien über eine Grob-zu-Fein Strategie und die Kleinste-Quadrate-Schätzung einer 7-Parameter Transformation. Neben der Georeferenzierung der Daten ist die Kolorierung und Klassifizierung der Punktwolke der wichtigste Aufgabenschritt. Hierzu werden für die LiDAR-Punkte die zugehörigen RGB-Farbwerte aus den Bildern extrahiert. Zudem erfolgt eine Klassifizierung, die zum einen Bodenpunkte erkennt und zum andern bewegte Objekte wie Fußgänger oder Fahrzeuge aus der Punktwolke eliminiert.
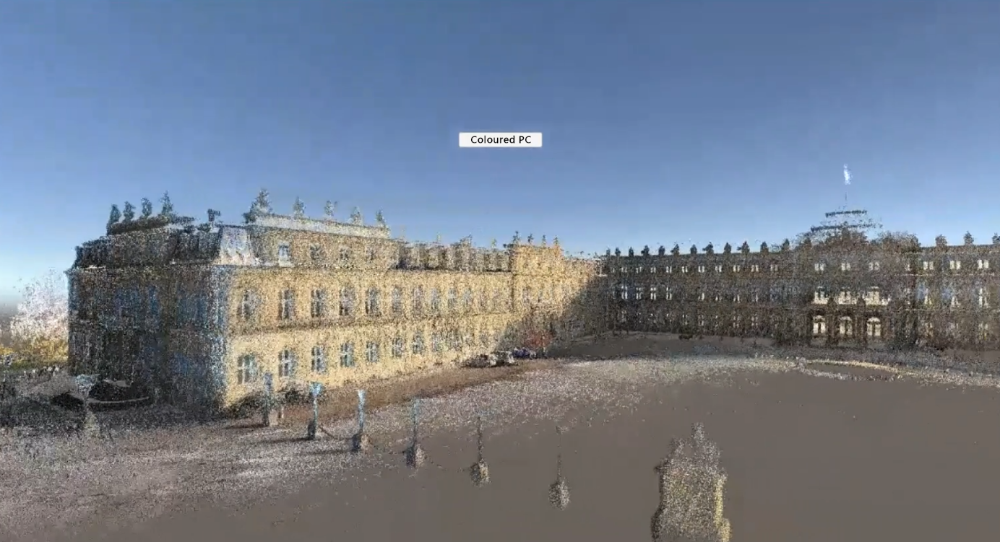
Die Visulisierung der Ergebnisse erfolgt in Unity und auf einer Cesium-basierten Website. Unity ermöglicht als Game Engine eine leistungsstarke Offline-Wiedergabe des kompletten Datensatzes einschließlich der Möglichkeit, sich innerhalb der 3D-Punktewolke frei zu bewegen. Cesium ist demgegenüber auf die Online-Wiedergabe von umfangreichen raumbezogenen Daten ausgelegt, indem diese für einen schnellen Bildaufbau in kleinere 3-D- Kacheln aufgesplittet werden.
Der Web-Viewer ist offen zugänglich:
https://ifpwww.ifp.uni-stuttgart.de/philipp/SIMP-viewer/SimpViewer.html
{kind=link}