
Vincent Ofosu Nyako
DUET Neural SLAM: Dense Pose Optimization of 2D LiDAR Data Using Oriented Neural Distance Fields
Duration: 6 months
Completion: February 2025
Supervisor: M.Sc. David Skuddis
Examiner: apl. Prof. Dr.-Ing. Norbert Haala, IfP
Disclaimer
Important Notice: This summary contains intentional omissions and limited technical details due to ongoing research and unpublished developments. Certain methodological aspects have been withheld to protect intellectual property rights associated with this research. The full technical implementation will be disclosed in future publications.
Motivation
Traditional SLAM systems face significant challenges including implementation complexity, software dependencies, inconsistent performance across environments, and limited accuracy due to sparse optimization. These limitations hinder applications requiring high precision, such as industrial inspection and architectural documentation.
The key insight driving this work is that only one possible robot trajectory could produce the observed LiDAR measurements given the true geometry of the environment. This observation leads to reconceptualizing SLAM as the interaction between a spatiotemporal property (robot trajectory) and environmental geometry, connected through sensor measurements. Any inaccuracies in either component manifest as discrepancies between predicted and actual measurements.
DUET Architecture
This work introduces the Dual Unified Enhancement Training (DUET) architecture. A neural approach to SLAM that enables dense optimization of LiDAR measurements while maintaining interpretability of individual components. By leveraging advanced neural representations, the DUET neural SLAM processes dense point clouds while remaining computationally tractable.
The architecture includes specialized components that enable pose optimization and environmental mapping. The system takes timestamps as input and produces both pose estimates and distance measurements as output.
Oriented Neural Distance Field
The oriented Neural Distance field (oNDF) represents a key innovation in this research. This nocel representation extends traditional Neural Distance Fields by incorporating directional information, enabling:
- Awareness of observation angles while capturing spatial geometry
- Generation of virtual measurements from arbitrary poses
Visualization of the learned distance field different azimuth angles demonstrates the network's ability to capture different obstacle visibility patterns based on viewing angle while maintaining consistent representation of major structural elements.


Training Approaches
Multiple training strategies were evaluated, with varying degrees of success. The most effective approach relied on initializing the model with pretrained components, followed by progressive trajectory optimization across successive training cycles. This approach demonstrated systematic convergence and improved accuracy, while maintaining the physical interpretability of each component.
Iterative Pretraining Results
The iterative refinement approach achieved an 18% improvement in trajectory accuracy compared to the reference SLAM implementation, while the end-to-end training approach failed to produce usable results.
Comprehensive evaluation of the iterative approach against established SLAM methods reveals competitive performance:

Beyond numerical metrics, the iterative DUET approach demonstrates qualitative advantages in trajectory smoothness and topological consistency while producing point cloud maps with reduced noise.

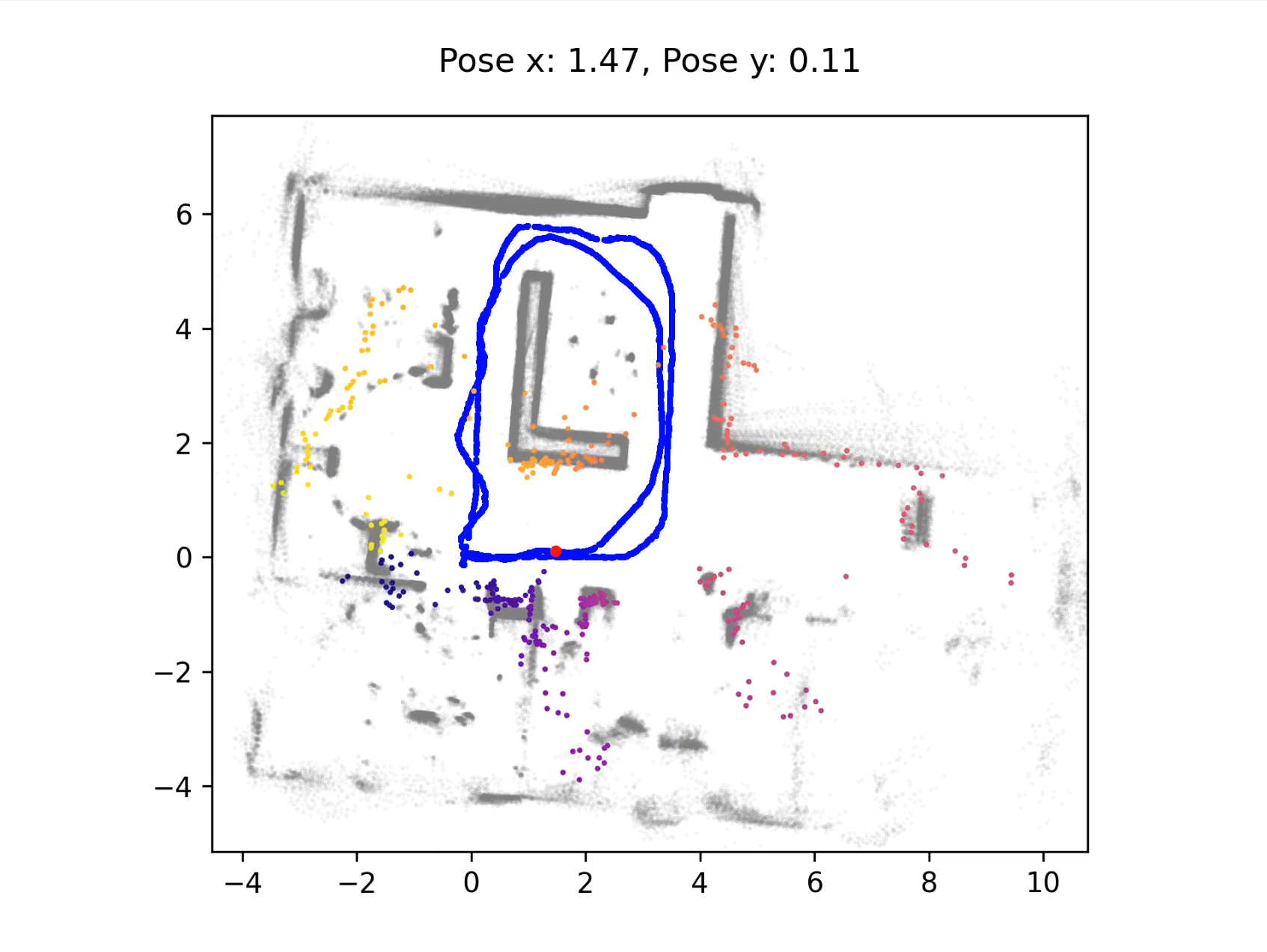
The oriented Neural Distance Field (oNDF) enables the generation of virtual LiDAR measurements from arbitrary poses within the environment. By querying the oNDF with different position and orientation combinations, we can simulate complete 360° LiDAR scans without requiring actual sensor data.
Demonstration of virtual LiDAR measurement generation using the oriented Neural Distance Field (oNDF)
{kind=link}
Figure 4: Demonstration of virtual LiDAR measurement generation using the oriented Neural Distance Field (oNDF). The video shows simulated 360° LiDAR scans, with the current pose highlighted in red. Colored points represent virtual measurements generated by the oNDF, while gray points show the reference map for comparison.
Conclusion
The DUET architecture successfully demonstrates that specialized neural representations of physical functions can be effectively combined while preserving component interpretability. The approach achieves comparable or slightly superior accuracy to traditional SLAM methods while offering potential for component reuse and adaptation.
However, significant limitations remain. The current implementation requires careful initialization strategies. Additionally, the accuracy of the oNDF representation exhibits a dependency on observation density, with sparse regions showing significantly higher uncertainties compared to well-observed areas.Future development will focus on achieving true end-to-end training without dependency on reference data.
Potential extensions include:
- Developing time-varying distance fields for modeling dynamic obstacle motion
- Incorporating uncertainty estimation in both pose and distance predictions
References (selection)
|
[1] |
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi and R. Ng, “NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,” in ECCV, 2020. |
|
[2] |
V. Sitzmann, J. N. P. Martel, A. W. Bergman, D. B. Lindell and G. Wetzstein, “Implicit Neural Representations with Periodic Activation Functions,” June 2020. Available: http://arxiv.org/abs/2006.09661. |
|
[3] |
L. Wiesmann, T. Guadagnino, I. Vizzo, N. Zimmerman, Y. Pan, H. Kuang, J. Behley and C. Stachniss, “LocNDF: Neural Distance Field Mapping for Robot Localization,” ral, vol. 8, no. 8, p. 4999–5006, 2023. |
|
[4] |
W. Zhang, D. Skuddis, P. J. Schneider and N. Haala, "Comparison of different 2D and 3D sensors and algorithms for indoor SLAM on a low-cost robotic platform," 42. Wissenschaftlich-Technische Jahrestagung der DGPF, pp. 280-289, 2022. |
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter