Hendrik Rechtsteiner
Comparison, benchmarking and optimization of Machine-Learning algorithms for the detection of parking and driving maneuvers of road vehicles using time series of the vehicle signal data
Duration: 6 months
Completition: February 2024
Supervisor: Dr.-Ing. Marco Zucchini (Robert Bosch GmbH)
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
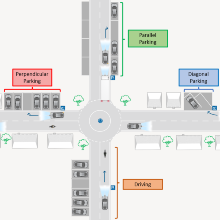
Ground vehicle maneuver classification stands as a pivotal task in automotive engineering, encompassing the accurate identification and categorization of vehicle movements crucial for various applications, including autonomous driving and driver assistance systems. In this master's thesis, we delve into the realm of machine learning to explore the efficacy of advanced algorithms in enhancing the classification accuracy and efficiency of ground vehicle maneuvers using signal data. Time series classification serves as the cornerstone of our research, offering a nuanced understanding of vehicle dynamics and behaviors.
Background and Motivation
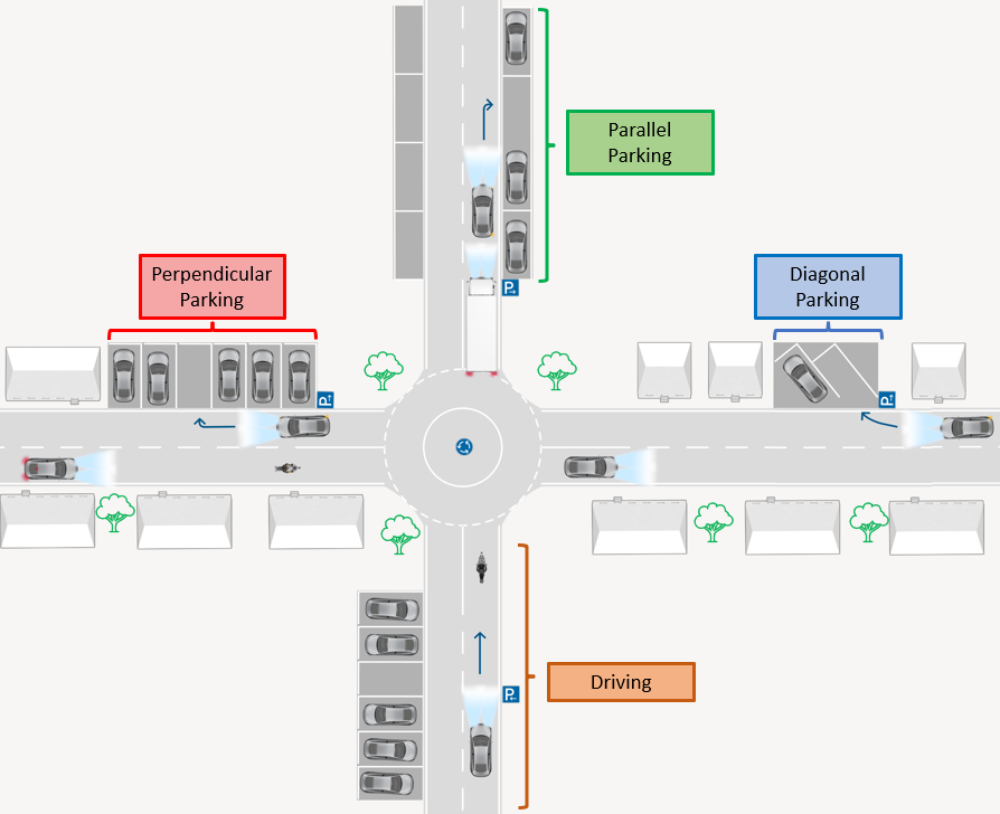
The intricate nature of ground vehicle maneuver classification demands the exploration of sophisticated machine learning algorithms capable of handling high-dimensional signal data while remaining robust to noise and variability. Among the algorithms under investigation, Hive-Cote 2 (HC2) and MultiRocket emerge as frontrunners, each possessing unique strengths and weaknesses. HC2, leveraging ensemble learning techniques, excels in accuracy by aggregating predictions from multiple classifiers, making it a popular choice for time series classification tasks. However, its computational complexity, particularly with large datasets, poses challenges in real-world deployment scenarios. Conversely, MultiRocket employs innovative approaches such as random convolutional kernels and random Fourier features to achieve rapid training times, rendering it suitable for real-time processing of extensive datasets.
Methodology and Experimental Setup
Our experimental methodology encompasses a setup involving a comprehensive ground truth database comprising over 1000 sequences of ground vehicle maneuvers, meticulously annotated with metadata. To ensure robust evaluation, the dataset is partitioned into distinct training and validation sets, facilitating rigorous performance assessment of HC2 and MultiRocket algorithms. Feature selection serves as a crucial pre-processing step, guided by correlation analysis and subset evaluations to identify six signals deemed most effective in achieving optimal classification results. Further refinement is achieved through hyperparameter optimization, aiming to maximize accuracy and F1 scores.
Results and Findings
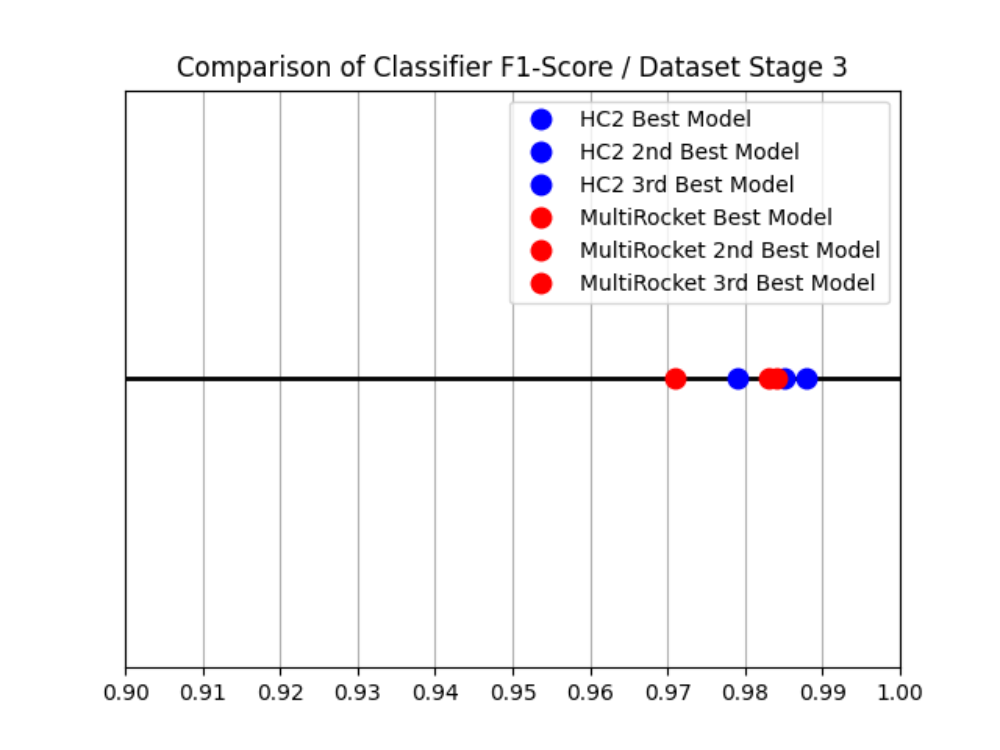
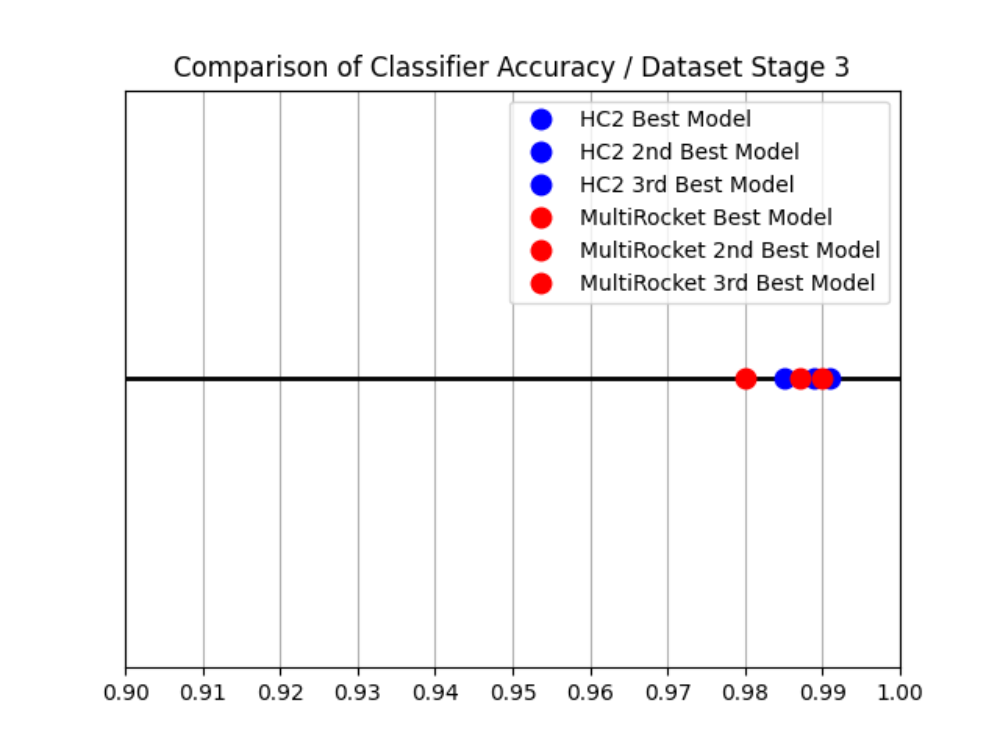
The results of our comprehensive experimentation reveal noteworthy performance from both HC2 and MultiRocket algorithms, surpassing predetermined benchmarks for accuracy and F1 scores. HC2 exhibits a slight advantage in accuracy, achieving an impressive score of 0.991 compared to MultiRocket's commendable 0.99. However, MultiRocket demonstrates significantly faster runtimes, with processing times averaging less than one second per sequence, rendering it highly suitable for real-time applications and large-scale dataset processing. These findings underscore the intricate trade-offs between accuracy and runtime efficiency inherent in machine learning algorithms, highlighting the need for careful consideration of algorithm selection based on specific application requirements.
Conclusion and Future Directions
In conclusion, our research offers valuable insights into the strengths and limitations of HC2 and MultiRocket algorithms for ground vehicle maneuver classification. While HC2 excels in accuracy, MultiRocket's superior runtime efficiency presents compelling advantages for real-time processing tasks. To harness the strengths of both algorithms, we advocate for the development of a dual classifier model that integrates HC2 and MultiRocket, offering enhanced efficiency and accuracy in maneuver classification tasks. Future research directions include exploring feature subsets, optimizing subsequence lengths, and refining training strategies to further advance algorithm performance and address real-world challenges in ground vehicle maneuver classification.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter