Moritz Roth
Kalibrierung einer drohnenbasierten Multikamera-Sensorplattform
Dauer: 6 Monate
Fertigstellung: Juni 2021
Betreuer: Dr.-Ing. Michael Cramer
Examiner: Prof. Dr.-Ing. Norbert Haala
Motivation und Zielsetzung
Bis zum Jahr 2030 will die neue EU-Kommission den Einsatz chemischer Pflanzenschutzmittel innerhalb der EU um 50 Prozent reduzieren. Um dieses Ziel zu erreichen, ist eine einzelpflanzenspezifische Behandlung nötig. Hierfür werden die Position und Art aller Unkräuter auf einem Feld benötigt. Eine günstigere und vor allem flexiblere Lösung für das Problem ist die Verwendung von hochaufgelösten Luftbildern. Hierdurch können Unkräuter erkannt und georeferenziert werden. Dies ermöglicht die Generierung von Spritzkarten und somit den gezielten lokalen Einsatz von Pflanzenschutzmitteln, anstatt ein ganzes Feld zu behandeln. Ein Aufnahmesystem mit einer hohen Flächenleistung ermöglicht eine betriebswirtschaftliche Erfassung der Wirtschaftsflächen. Um trotz der hohen Flächenleistung die benötigte Auflösung am Boden zu erreichen, ist eine Multikamera-Sensorplattform geeignet. Die Arbeit umfasst die Konzeption des Mehrkopfkamerasystems inklusive Auswahl und Untersuchung der verwendeten Kameras auf ihre Langzeitstabilität, deren Genauigkeit sowie das Auflösungsvermögen.
Die Anforderungen für das Aufnahmesystem lauten wie folgt:
- Sub dm Positionsgenauigkeit (Mittels RTK)
- GSD von 1 mm, damit Unkräuter zuverlässig identifiziert werden können
- Hohe Flächenleistung
- Geringes Gewicht, da der Einsatz auf einer UAV geplant ist
- Kostengünstig
Auswertung
Für die Untersuchungen wurde zuerst ein Test-RIG (Abb.1) entworfen und ausgewertet. Nach erfolgreichen ersten Tests wurde das spätere Kamera-RIG angefertigt und untersucht (Abb.2).
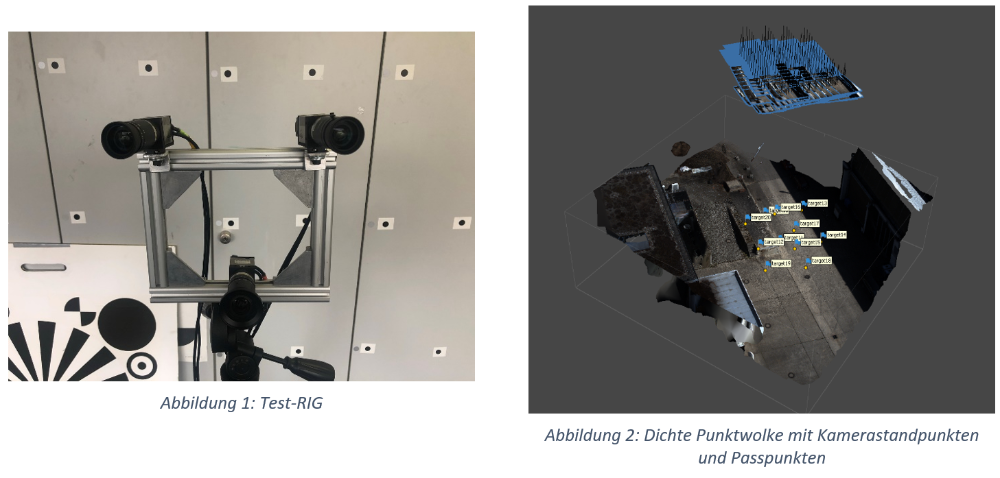
Bei einer Auswertung des Kamera-RIGs konnte eine absolute Genauigkeit von etwa einem cm sowohl an den Passpunkten als auch an den Kontrollpunkten festgestellt werden. Diese erste Auswertung basiert rein auf Passpunkten, da das RTK-System zu diesem Zeitpunkt noch nicht funktionsfähig war.
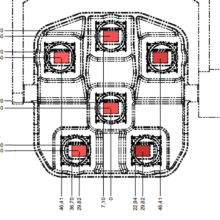
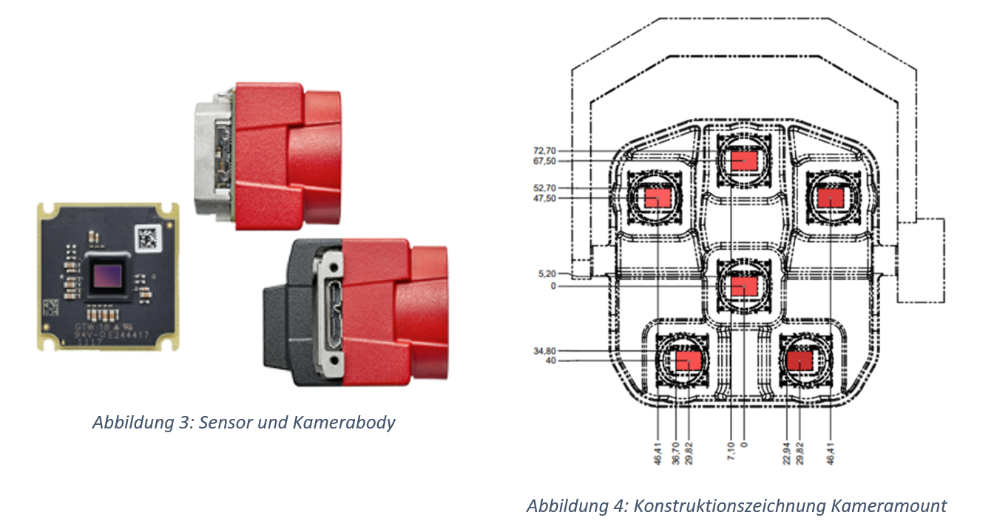
Die Auswahl der Kamera viel auf die Alvium 1800 U -1236 (Abb.3) der Firma Allied Vision mit einem 12 MP CMOS Sensor und einem globalen elektronischen Verschluss, um die Bewegungsunschärfe zu minimieren. Als Objektive dienen 100 mm Festbrennweiten Optiken, die durch wenig interne Mechanik stabiler sind als welche mit einstellbarem Fokus. Durch den USB3.1 Anschluss können die Kameras angesteuert und die Bilddaten abgespeichert werden. Die zeitsynchrone Triggerung geschieht über einen extra Anschluss. Bei der Untersuchung des Tiefenschärfe konnte ein Bereich von etwa 4 m nachgewiesen werden, in dem die Auflösung der Anforderung von 1 mm GSD entspricht. Die Auflösung nimmt in den Eckbereichen um etwa 7 % im Vergleich zum Zentrum ab. Bei einer Stabilitätsuntersuchung über einen Zeitraum von einem Monat konnte eine Veränderung von etwa 20 Pixeln nachgewiesen werden. Wie genau sich dies auf das Endergebnis auswirkt muss allerdings noch durch weitere Tests überprüft werden. Die Konstruktionszeichnung des Kameramounts ist in Abbildung 4 zu sehen. Diese wird 3D gedruckt und ist somit leicht und stabil. Außerdem können Änderungen schnell und kostengünstig durchgeführt werden.
Bei einer späteren Auswertung eines Feldes basierend rein auf den RTK Beobachtungen, also mittels direkter Georeferenzierung, konnten folgende Genauigkeiten in der Luft, sowie an den Kontrollpunkten erzielt werden:


Die mittlere Abweichung in der Luft, also der Unterschied aus gemessener Position des RTK-Systems und der ausgeglichenen Position aus der Bündelblockausgleichung beträgt etwa 5 cm. Dieser Wert überträgt sich fast direkt in die Positionsgenauigkeit im Objektraum mit etwa 6 cm. Die Unsicherheit in der Höhe ist, wie bei Photogrammetrischen Auswertungen üblich, etwas größer mit etwa 10 cm, allerdings immer noch im Toleranzbereich.
Fazit
Im Zuge dieser Masterarbeit wurde ein drohnenbasiertes Kamera-RIG konzipiert, gebaut und untersucht. Die Anforderungen bezüglich Auflösung, Positionsgenauigkeit und Effizienz werden erreicht und das System ist funktionsfähig. Zudem wurde der Workflow für die Auswertung der Bilddaten in Agisoft Metashape entwickelt und optimiert.
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme