
Philipp-Roman Hirt
Automatisierte Fusion von 2D- und 3D-Sensordaten zur zuverlässigen Detektion von Strukturmerkmalen
Dauer der Arbeit: 6 Monate
Fertigstellung: Oktober 2019
Betreuer: Carsten Frey, M.Sc. (Fraunhofer-IPM), Prof. Dr. Alexander Reiterer
Prüfer: Prof. Dr.-Ing. Norbert Haala
Motivation und Ziel der Arbeit
Für die effiziente Planung von Instandhaltungsarbeiten an Straßen ist eine umfangreiche Erfassung und Bewertung des Oberflächenzustands unerlässlich. Während bis dato diverse Erfassungssysteme existieren, geschieht die Auswertung noch größtenteils manuell. Um diesen immensen Kosten- und Zeitaufwand zu reduzieren, wird eine automatische Auswertung von Straßenmessdaten zur Detektion von Schadstellen angestrebt.
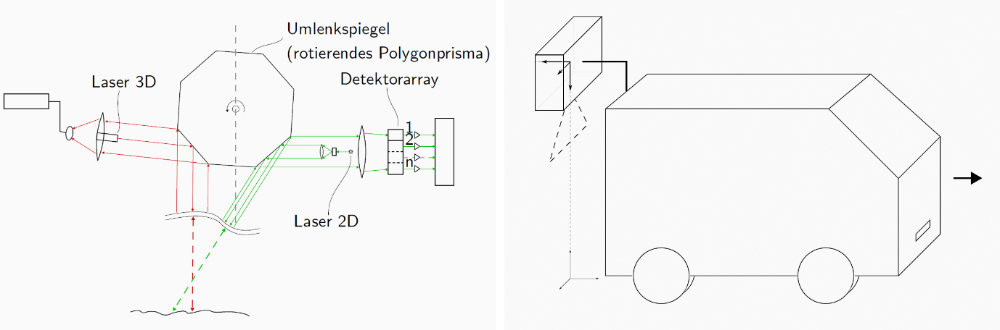
Das Fraunhofer-Institut für Physikalische Messtechnik in Freiburg i. Br. bietet hierbei mit der Eigenproduktion PPS-Plus (Pavement-Profile-Scanner-Plus) ein Erfassungssystem, das auf Laserscannern basiert und sowohl dreidimensionale Punktwolken als auch hochaufgelöste zweidimensionale Messungen der Rückstreuintensität der Straßenoberfläche liefert.
Ziel dieser Arbeit ist die Verarbeitung und Fusion der so erhaltenen Daten. Um später eine automatisierte Auswertung zu ermöglichen, müssen die Daten auch zueinander in Bezug gesetzt werden – hierfür soll ein Raster die Grundlage bieten, das sowohl den dreidimensionalen als auch den zweidimensionalen Daten eine gemeinsame Referenz bietet.
Vorgehensweise zur Datenverarbeitung und -fusion
Der PPS-Plus ist ein Profilscanner, das heißt, er scannt jeweils eine Linie der Straßenoberfläche ab und nimmt so durch die Bewegung des Fahrzeugs die gesamte Oberfläche auf. Die Daten des Laserscanners mit Entfernungsmessung werden zunächst so transformiert, dass die Profile untereinander aufgereiht werden. Dies ermöglicht bei Betrachtung von oben eine kontinuierliche, nicht von Kurven beeinflusste Darstellung der Messungen.
Aus der dreidimensionalen Punktwolke wird durch ein Raster in der Grundebene ein sogenanntes Oberflächenmodell erstellt: Jedem Punkt auf dem Raster wird genau ein Höhenwert zugeordnet. Somit liegen die Daten in einem rechteckigen Raster vor und können ebenfalls als Bild dargestellt werden.
Ziel ist es, die Oberfläche möglichst anschaulich darzustellen. Hier eignet sich der Ansatz der Schummerungsberechnung – es werden die Normalenvektoren der Straßenoberfläche berechnet, womit sich eine künstliche Beleuchtung simulieren lässt. So zeigt sich die Beschaffenheit der Oberflächenstruktur durch Wechselwirkung mit einer künstlichen Lichtquelle.
Die zweidimensionalen Intensitätsmessungen verfügen über eine deutlich höhere Auflösung als die 3D-Daten. Für jede Messung liegen aufgrund der Beschaffenheit des Systems ein Intensitätswert sowie der Winkel, unter dem Wert gemessen wurde, vor. Die Grauwerte lassen sich wie bei einer Kamera auf eine feste Ebene projizieren, womit eine „Fotografie“ der Straßenoberfläche generiert wird.
Da hierbei jedoch das eigentliche Gelände nicht berücksichtigt wird, kommt es zu Verschiebungseffekten, wenn innerhalb eines Abschnitts deutliche Höhenunterschiede vorliegen. Daher wird anschließend ein sogenanntes Orthophoto berechnet – diese Methode wird zum Beispiel auch auf Luftbilder angewendet, um die Gebäudeumrisse mit denen auf einer Landkarte zur Deckung zu bringen und „Umklappeffekte“ an Gebäudefassaden zu vermeiden.
In dieser Arbeit dient die Orthophotoberechnung dazu, beide Datenströme auf ein gemeinsames Raster zu bringen, sodass die Daten für je ein bestimmtes Pixel auch in der Realität übereinander liegen.

Ergebnisse und Fazit
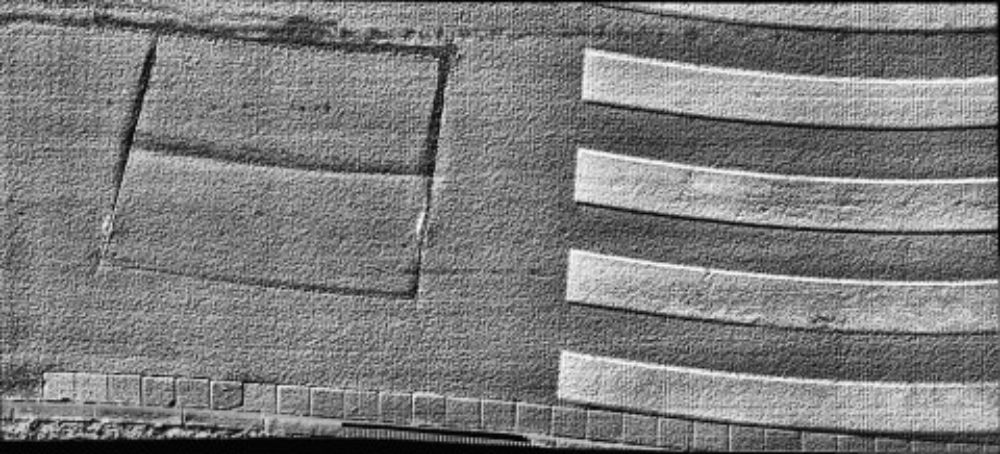
Die erhaltenen Einzelergebnisse – Schummerungsbild und Orthophoto – werden miteinander kombiniert, woraus sich ein sehr anschaulicher und plastischer Eindruck der Straßenoberfläche ergibt. Mit diesem ist es theoretisch möglich, Trainingsdaten für einen Erkennungsalgorithmus zu generieren und so automatisch Schadstellen in der Straßenoberfläche zu detektieren.
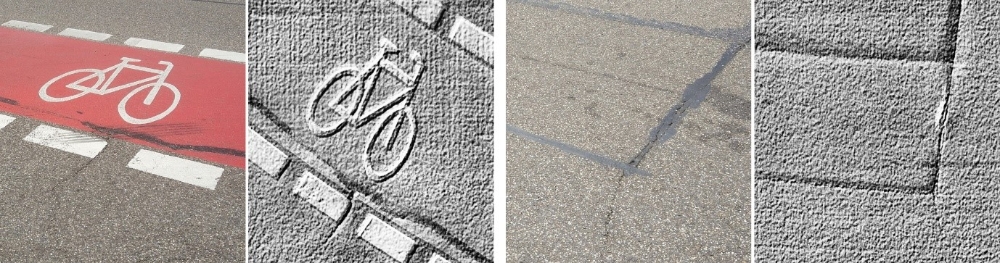
Vergleiche mit der Realität zeigen jedoch, dass gerade feine Strukturen nicht vom Messsystem erfasst werden und auch durch die aufwändige Nachverarbeitung nicht sichtbar werden. Für eine Rissdetektion in den tatsächlich geforderten Genauigkeitsbereichen sind die Daten somit unzureichend, auch wenn der Ansatz der Datenfusion grundsätzlich funktioniert und auch die Ergebnisse größtenteils ansprechend sind.
Während der Arbeit wurden darüber hinaus umfangreiche Erkenntnisse über weitere Einflüsse auf das Messsystem gewonnen, die in den aktiven Entwicklungsprozess einfließen können.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter