Yusheng Wang
A low cost demonstrator for autonomous driving
Duration of the Thesis: 6 months
Completion: May 2019
Supervisor: Dr.-Ing. Michael Cramer
Examiner: Prof. Dr.-Ing. Norbert Haala
The concept of autonomous driving is popular today, thus a growing number of people become interested in this field. Regrettably, considering the high cost of typically used sensors and equipment, there are no such autonomous driving platforms in many universities and institutes, to demonstrate this technology. As the Light Detection and Ranging (LiDAR) is one of the mainly used sensing components on unmanned vehicles and Simultaneously Localization and Mapping (SLAM) is of great importance for not only driverless vehicles but also robots in non-GPS assisted areas, the LiDAR based SLAM is chosen for the demonstrator.
In this dissertation, a low-cost autonomous driving platform is developed under Linux operation system. The platform is controlled by a Raspberry Pi 3B connected to a computer with the support of Robot Operation System (ROS), which also contains the library needed for hardware and SLAM algorithms. The Raspberry Pi 3B receives commands sent from the computer and integrates the data from RPLiDAR and Inertial Measurement Unit (IMU), the task of the computer is controlling and visualization of the map and path. The communication between sensors and with computer are tested and the sensors are calibrated before the experiment.
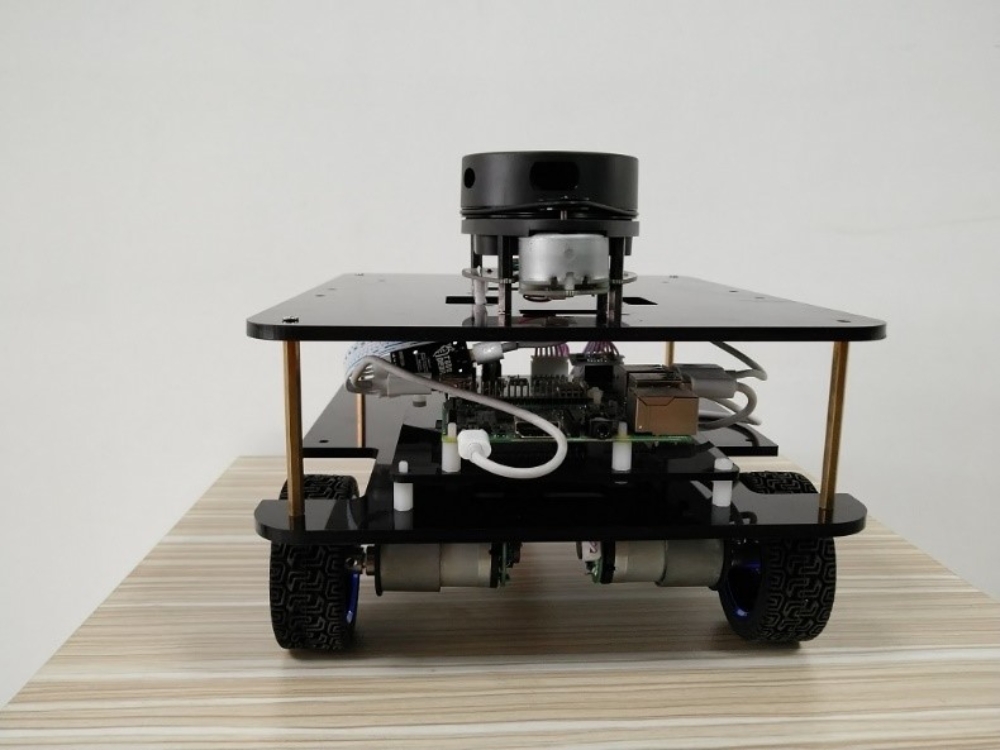
The aim of this demonstrator is to help students understand part of the algorithms on the popular autonomous driving, low cost sensors and processors for sake of “low-cost system” and the whole system is shown in Fig 3.1, with an extra computer for control, computation, and visualization.
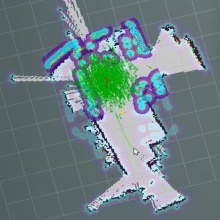
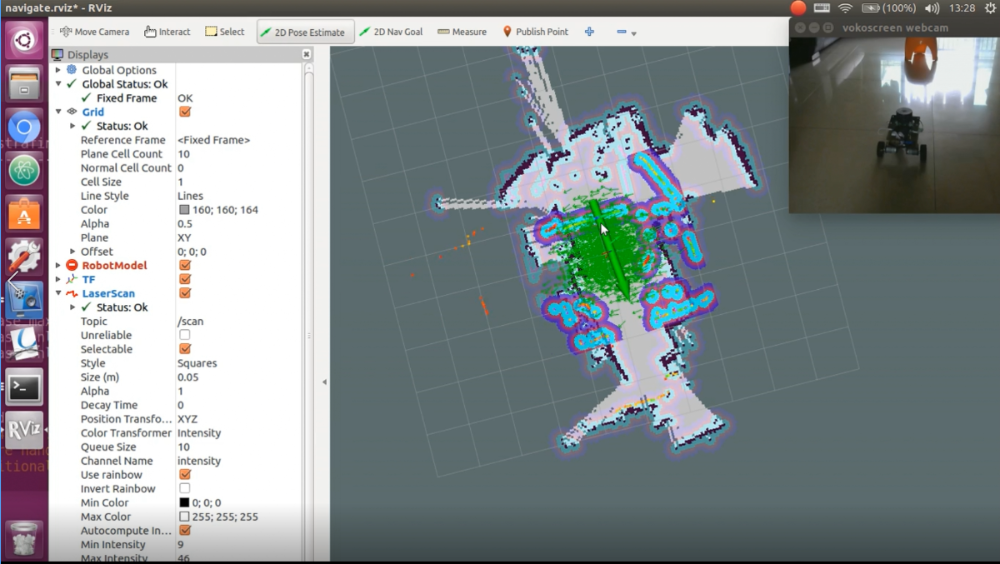
The pros and cons of several SLAM algorithms are compared at first, the hector mapping is chosen for no need of IMU and prior knowledge-based navigation are performed on this platform, the result shows that the manually or automatically created map fits the real-world situation and with real-time updating, the vehicle can avoid any new or moving obstacles without human help.
The expensive sensors and testing vehicles is a great barrier for such research normally, but the platform in this thesis only cost for around €300. Thanks to the cheap sensors and Robot Operating System (ROS), the platform can autonomously navigate itself and avoid obstacles like a real vehicle. The main features of the system are
- High mobility: The vehicle is connected to a laptop and controlled by the keyboard. Due to the support of the ROS, this vehicle can also be controlled by a wireless gamepad, and because of the virtual machine software, the vehicle can connect to any new computers instantly. What is more, by installing related APP on the smartphone, the vehicle can be manipulated and visualized on every smart phone.
- High expansibility, although LiDAR is the sensing component, the vehicle is designed to have also a depth camera platform. With the depth camera, the vehicle can carry out the normal open-CV based image recognition, which can help create a more precise map. Besides that, the luxuriant ROS library can realize almost everything in the area of computer vision.
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme