Fangwen Shu
Implicit Joint Semantic Segmentation of Images and Point Cloud
Duration of the Thesis: 6 months
Completion: April 2019
Supervisor: M.Sc. Dominik Laupheimer
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
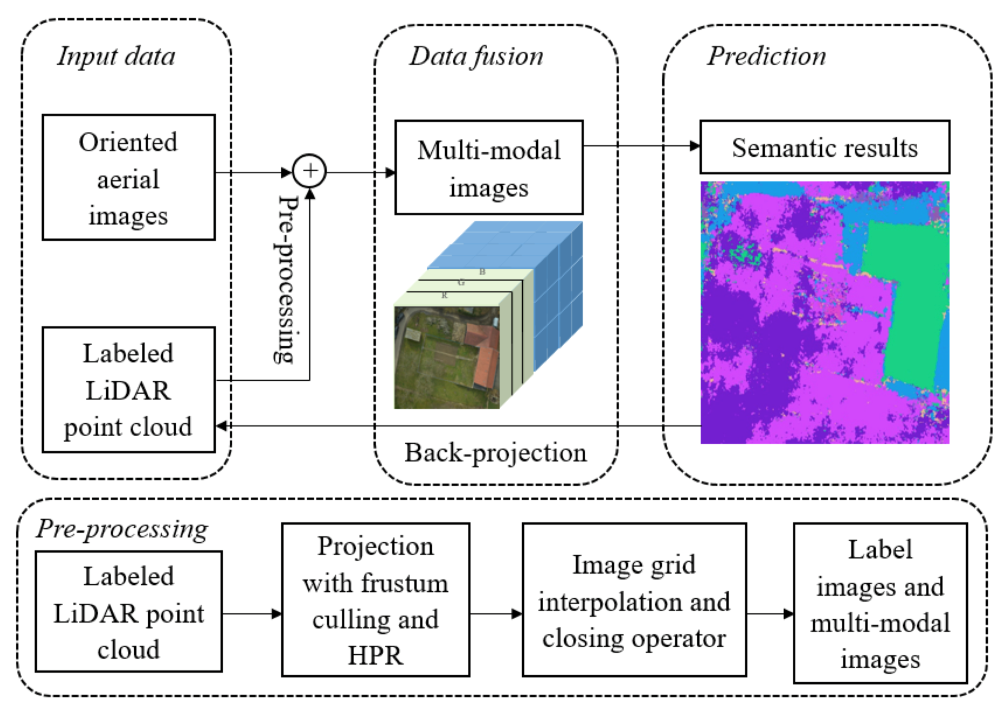
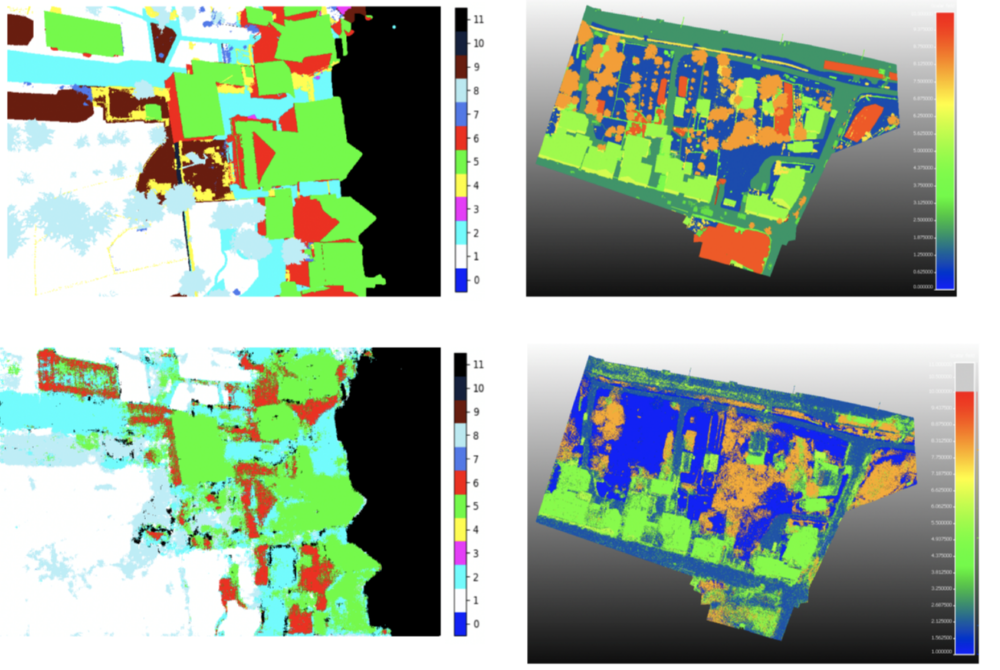
In order to avoid feeding noisy or non-uniformly sampled point cloud into 3D CNN, in this work, a novel fusion of the labeled LiDAR point cloud and oriented aerial imagery in 2D space is hypothesized, in this way, we can leverage image-based semantic segmentation and create a multi-view, multi-modal and multi-scale segmentation classifier. Thereafter through a fast back-projection of the 2D semantic result to 3D point cloud, we achieve a joint semantic segmentation of imagery and point cloud. The proposed method is validated against to our own dataset: the oriented high-resolution oblique and nadir aerial imagery of village Hessigheim, Germany, captured by unmanned aerial vehicle (UAV), as well as the LiDAR point cloud obtained by the airborne laser scanning (ALS) device. The high resolution aerial images offer views of diverse urban scene, with useful geometric characteristics derived from point cloud, it is a potential combination to set up a big dataset for training a well-engineered deep CNN.
Dataset
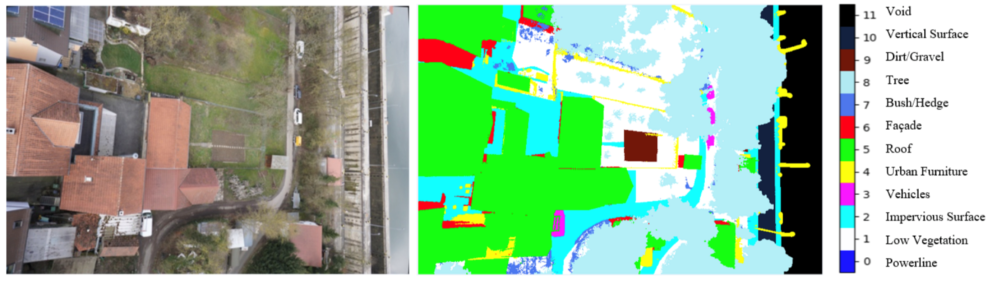
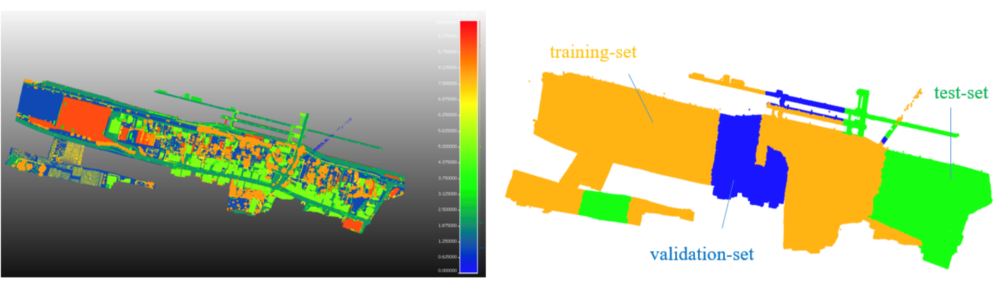
In this work, a large-scale ALS point cloud covering the village Hessigheim, Germany, as well as the nadir and oblique imagery which are captured by UAV (Cramer et al., 2018). It is worth to note that LiDAR point cloud is already manually labeled (master thesis from Michael Kölle), while aerial imagery is not labelled initially.
Methodology to Establish Connection Between 3D Point Cloud and 2D Imagery
Training
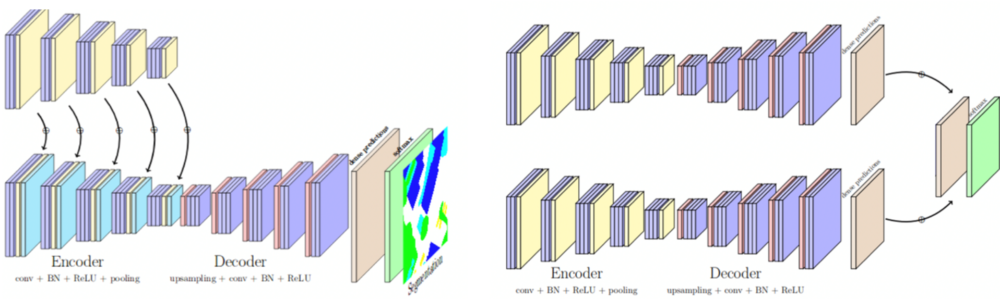
Different fusion strategies of multi-modal data were tested based on different CNNs.
- Naïve stacking:
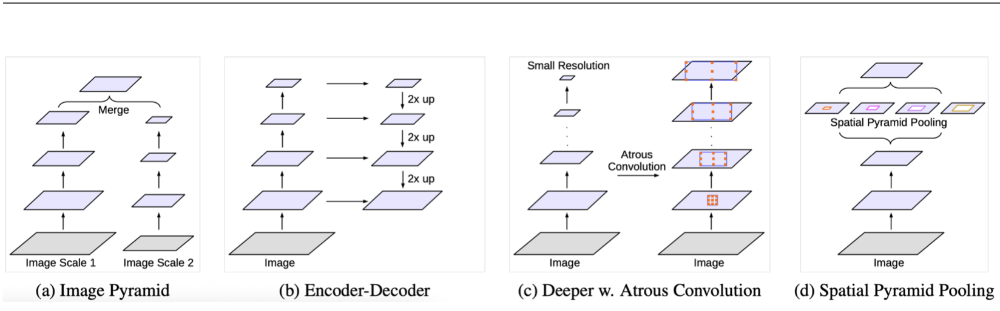
- Multi-scale fusion:
- Early- or late-stage fusion of feature map:
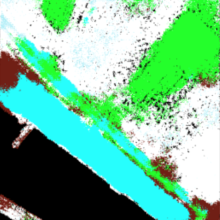
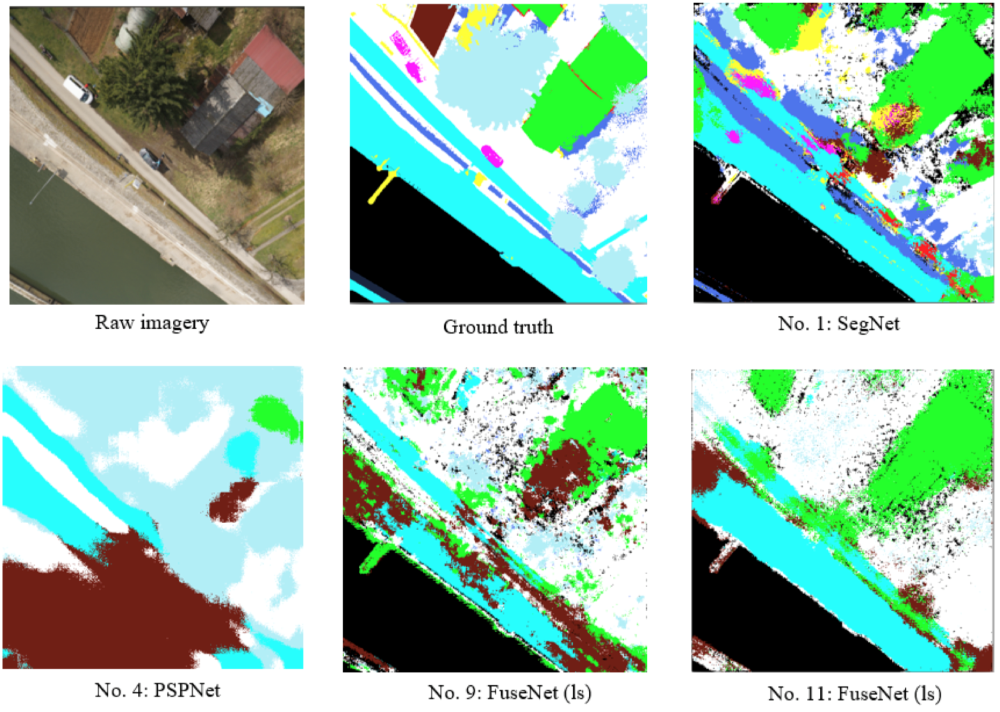
Results
References
Audebert, N., Le Saux, B., and Lefèvre, S. (2018). Beyond rgb: Very high resolution urban remote sensing with multimodal deep networks. ISPRS Journal of Photogrammetry and Remote Sensing, 140:20–32.
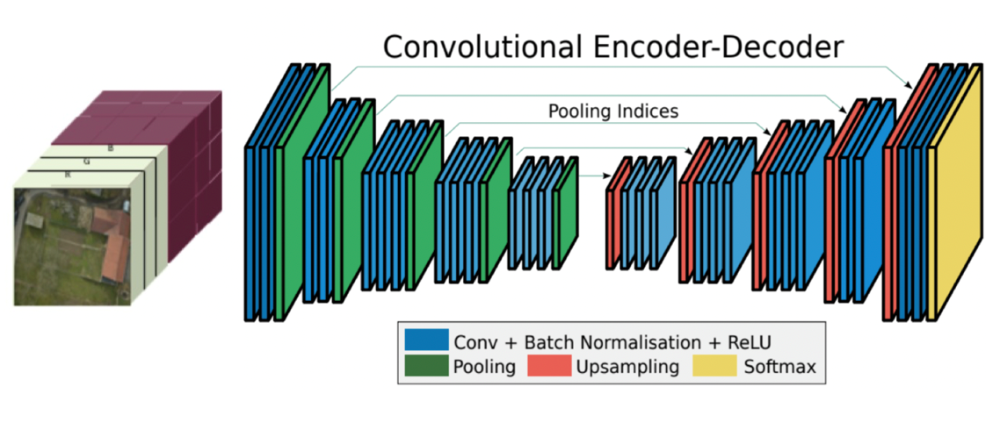
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017). Segnet: A deep convolutional encoderdecoder architecture for image segmentation. IEEE transactions on pattern analysis and machine intelligence, 39(12):2481–2495.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H. (2017). Rethinking atrous convolution for semantic image segmentation. arXiv preprint arXiv:1706.05587.
Cramer, M., Haala, N., Laupheimer, D., Mandlburger, G., and Havel, P. (2018). Ultrahigh precision uav-based lidar and dense image matching. International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter