
Mohammad Hossein Shoushtari
Modeling and Prediction of On-Street Parking Spaces Using Geospatial Analytics
Duration of the Thesis: 6 months
Completion: December 2018
Supervisor: Dr.-Ing. Volker Walter (In cooperation with EasyPark group)
Examiner: Prof. Dr.-Ing. Uwe Sörgel
Introduction
In autonomous vehicles, after landing all the passengers, the car locates the right street and park itself in an available space. The optimal path for the autonomous car to navigate itself and find an empty space in optimum time and route is under question mark. The parking prediction is the main need, even when the real time parking information is available using a sensor network, etc. Geospatial Information System (GIS) and data sciences provide powerful tools for predicting the on-street parking space as a benefit of smart cities benefit to smooth the parking problem. Not only for autonomous vehicles, but also searching for on-street parking spaces for all drivers has resulted in extra costs for the drivers in terms of time, fuel consumption, etc. Different effective factors in parking problem will summarize in two main categories, naming time features and features based on geospatial analytics so called “geo-features”.
Geo-Features
A process of creating features that make machine learning algorithm work better, that named feature engineering, is considered essential in applied machine learning. Geo-features are the results of feature engineering in geospatial analytics field. Features coming from the geospatial analytics are named as geo-features. When drivers trying to answer this question that why there is a parking problem in the area, usually keep saying because of the specific weekday or weather situation in the area and events like a concert, football play or famous places etc. Moreover, time and semantic features are more meaningful when the system can distinguish between a situation in parts of the covered parking space in a sunny day and the same parts with the rainy weather.
Data Collection
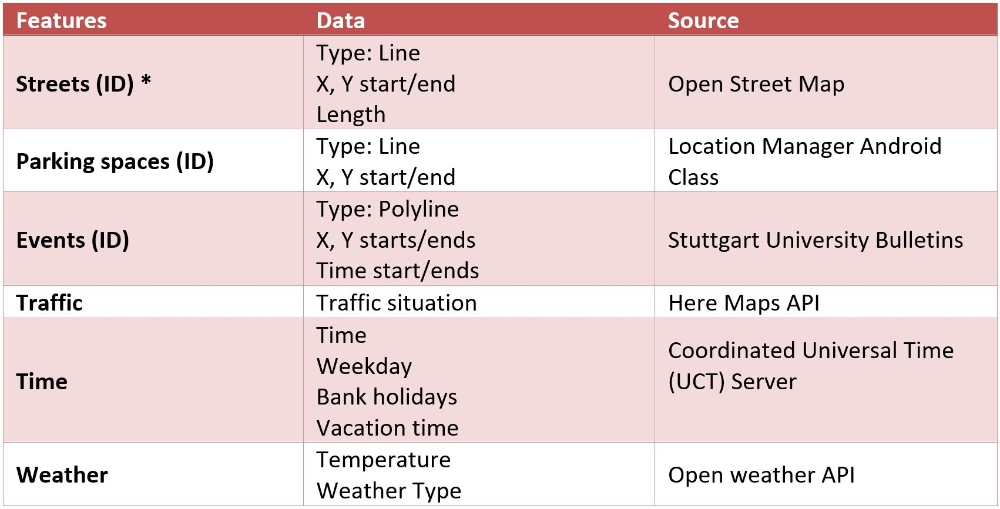
Since the parking availability is highly variable, based on many factors, like the time, weekday and area’s traffic, compounding the problem, there is almost no real time information about free parking spots. Therefore, data collection using a smartphone application, which is named ParkYar, is desired, in which it would be supported by the scenario. The objective of the Android application implementation is the data collection. The advantage of developing such an application would be a collection of the real time data as area’s traffic, which is defined based on the user latitude and longitude. Geometric and semantic features and its sources are listed as following table.
Modeling and Predicting
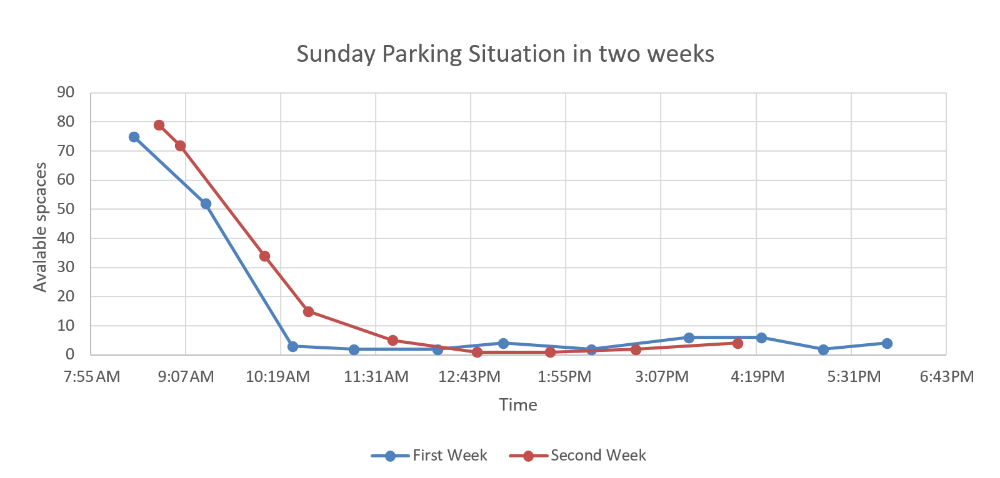
The user will answer this question in the ParkYar app; “How many free spaces did you see during your drive in this street?” Answers will shape three classes based on the street’s available capacity ratio as “GREEN”, “ORANGE” or “RED” class. The figure bellow shows the available spaces during the time of day for a weekday in two weeks.
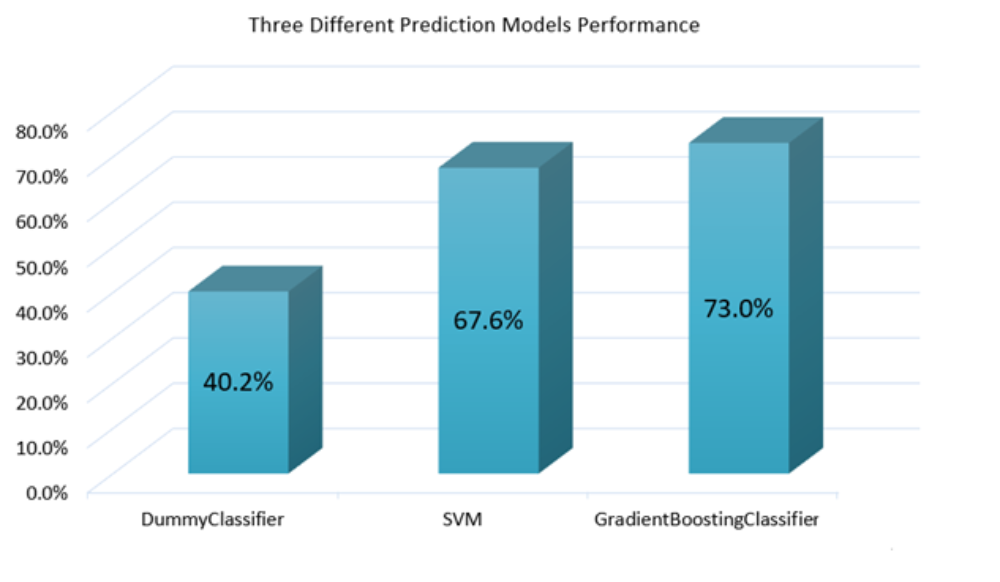
Three different classifiers available in scikit learn library is used named as “Gradient Boosting Classifier”, “Support Vector Machines” and finally the “Dummy Classifier”, as the baseline model, are used to predict the classes. The testing dataset, which was 25% of the whole of the dataset, is used to select the best predictor while they were out of the training process and selected randomly. The overall accuracy is calculated for different prediction modeling showed in figure 2.
Results
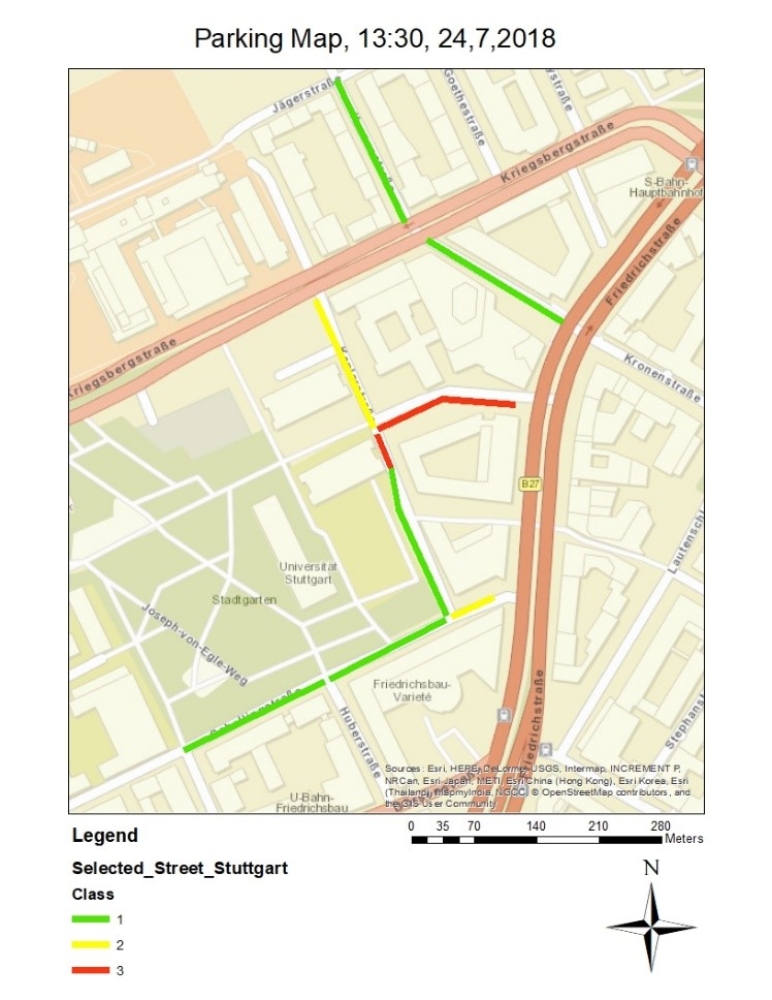
The prediction classes are shown in different colors which is easy for users to survey the streets that they are interested in.
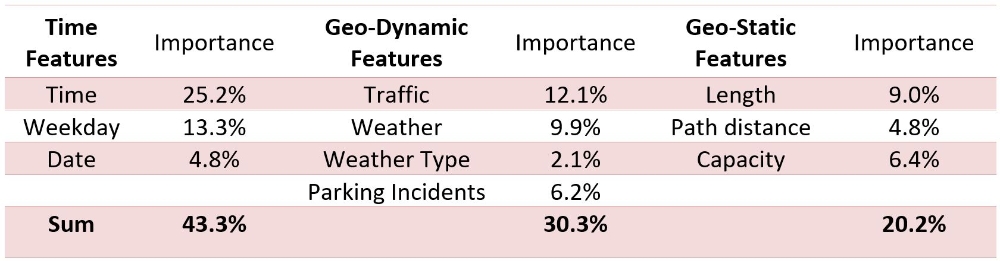
Bagged decision trees like, Gradient Booted trees can be used to estimate the importance of features. It can be seen that an importance score for each attribute where the larger the score, the more important the attribute. The table below shows the output.
Conclusions
On-street parking prediction is important for today smart cities and autonomous driving in the future. Geodata based analytics are almost effective as time features in this problem. However, time factors are the main keys.
Geospatial way of thinking allows us to use the benefits of geospatial analytics to calculate the characteristic of a street regarding the parking problem and by considering the semantic, time and geospatial factors at the same time. For instance, time series prediction analysis is a benefit of finding the repetitive pattern on the neighbors and not a single street. However, the parking prediction is required for even a street segment based on different dynamic and static geo-features and time factors their selves. Using the geo-features as path distance, not only the street connectivity, but also the close street which has no path and effect on each other is considered.
In fact, dynamic and Static geo-features can provide added value for many datasets and play an important role in solving many data science problems.
References
[1] C. Pflügler, T. Köhn, M. Schreieck, M. Wiesche, and H. Krcmar, “Predicting the Availability of Parking Spaces with Publicly Available Data,” Lecture Note in Informatics (LNI), 2016.
[2] A. Ionita, A. Pomp, M. Cochez, T. Meisen, and S. Decker, “Where to Park?,” 8th Intern. Conf. Web Intell., Mining and Semantics - WIMS ’18, pp. 1–12, 2018.
Ansprechpartner

Volker Walter
Dr.-Ing.Gruppenleiter Geoinformatik