
Stefan Kohler
3D-Unkrauterkennung für Echtzeitverfahren in der Landwirtschaft
Dauer der Arbeit: 6 Monate
Abgabe: August
Betreuer: Dipl.-Ing. David Reiser (Uni Hohenheim), M.Sc. Stefan Schmohl (Uni Stuttgart)
Prüfer: Prof. Dr.-Ing. Norbert Haala
Einleitung
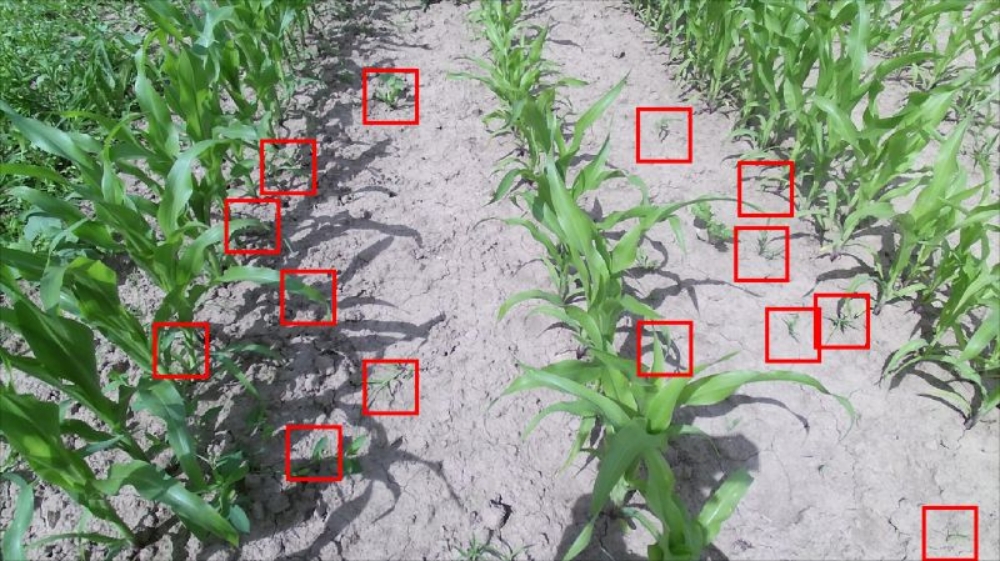
Diese Arbeit untersucht die Verwendung von Convolutional Neural Networks (CNN) zur Trennung der Kulturpflanze von Unkraut in Maisfeldern. Datengrundlage dazu sind von einer Kinect One in Brusthöhe aufgenommene perspektivische Bilder mit den Kanälen RGB, nahem Infrarot und Tiefe. Die Kinect One ist an einem durch das Maisfeld fahrenden Roboter angebracht. Zuerst wird untersucht, ob vorhandene Algorithmen der Schwellenwertbildung (Excess Green, Excess Red, Color Index of Vegetation Extraction, CIE L*a*b*-Farbraum) die Klassifizierung mittels CNN erleichtern können. Zur eigentlichen Klassifizierung mittels Convolutional Neural Networks wird ein Trainingsdatensatz erzeugt, der die realen Feldbedingungen widerspiegelt. Mithilfe dieses Datensatzes wird das CNN trainiert und getestet. Zur Gewinnung der Regions of Interest (RoI) werden zwei Verfahren herangezogen. Der erste Ansatz verfolgt das im vorherigen Bild erkannte Unkraut über Structure from Motion und berechnet Epipolarlinien. Der zweite Ansatz behilft sich eines Cannyfilters und generiert daraus RoI der Unkräuter.
Die Klassifizierung erreicht eine Overall-Accuracy von 94 Prozent. Wird speziell die Klasse Unkraut betrachtet, so zeigt sich ein ernüchterndes Ergebnis. Zwar ergibt sich eine Producer's Accuracy von 92 Prozent, die User's Accuracy liegt jedoch nur bei 66 Prozent. Die Berechnung der 3D-Koordinate setzt eine pixelgenaue Klassifizierung und gegenseitige Zuordnung voraus. Da dies im Verlauf der Arbeit nicht zufriedenstellend gelöst werden kann und die durch die Aufnahme bedingte Umgebung eine mathematisch schlechte Berechnungsgrundlage aufzeigt, ist eine punktgenaue Berechnung der 3D-Koordinate nicht möglich. Aufgrund fehlender Georeferenzierung ist eine absolute Aussage über den auftretenden Fehler nicht zu treffen. Um dies jedoch zu gewährleisten, wird im Verlauf der Arbeit ein weiterer Bilderdatensatz aufgenommen. Hierzu wird die Sequoia Industriekamera der Firma Parrot verwendet. Diese Multispektralkamera wurde speziell für landwirtschaftliche Anwendungen entworfen. Sie nimmt zusätzlich zum Rot- und Grünkanal die Kanäle des nahen Infrarots und des Red-Edge auf, verzichtet dagegen auf den Blaukanal. Erste Klassifizierungsergebnisse der Sequoia-Bilder zeigen das Potential der Kamera auf, Schwierigkeiten ergeben sich bei der Band-zu-Band Registrierung.
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme