Svenja Ehmke
Qualifizierung von Sensoren zur Kollisionsvermeidung beim automatisierten Fahren
Dauer der Arbeit: 6 Monate
Abgabe: Juli 2018
Betreuer: Dipl. Ing. Bernd Schuler (Daimler AG)
Prüfer: Prof. Dr.-Ing. Norbert Haala
Einleitung
Die Neufahrzeuge der Daimler AG sollen zukünftig innerhalb des Werks automatisiert vom Förderbandende der Fahrzeugmontage zum Verladeparkplatz fahren. Damit sollen die Wirtschaftlichkeit und der Technologiestand verbessert werden. Die Sicherheit hat dabei höchste Priorität. Es ist zu beachten, dass ein Großteil der Strecken über Straßen im Werk verläuft. Neben Witterungseinflüssen ist auch ein starkes Verkehrsaufkommen und Personenverkehr vorhanden. Für diesen Sonderfall des automatisierten Fahrens ist jedoch eine bauliche Gestaltung des Umfelds möglich.
Für die technologische Entwicklung des automatisierten Fahrens sind verschiedene Sensortechnologien entscheidend, von denen einige schon für heutige Fahrerassistenzsysteme genutzt werden. Allerdings sind die Funktionsweisen sehr unterschiedlich, nicht jede Technologie ist für jedes Einsatzgebiet geeignet. Eine Sensordatenfusion mehrerer Technologien ist eine Möglichkeit eventuelle Defizite einzelner Sensortechnologien zu kompensieren.
Bisher war noch unklar, ob die Sensortechnologien unter Sicherheitsaspekten für vollständig automatisiertes Fahren ausreichen. Dieses wird in der Thesis anhand verschiedener praktischer Tests beantwortet. Zudem gibt es innerhalb des Werks Rahmenbedingungen zu beachten. Diese sind zusammen mit den Testergebnissen die Grundlage sicherer und wirtschaftlicher Systemvorschläge für das Projekt.
Für praktische Untersuchungen werden aus den möglichen Sensortechnologien LIDAR (Light Detection And Ranging) und RADAR (Radio Detection And Ranging) ausgewählt, da diese aufgrund ihrer physikalischen Eigenschaften die besten sicherheitstechnischen Voraussetzungen für den Allwetterbetrieb und die Entfernungsmessung von Objekten bieten.
LIDAR
Die Erkennung verschiedener realer Objekte mit unterschiedlichen Oberflächeneigenschaften ist zu verifizieren. Da für LIDAR die Outdoor-Bedingungen eine Herausforderung darstellen, werden zusätzlich zum Beispiel Regen oder Gegenlicht überprüft.
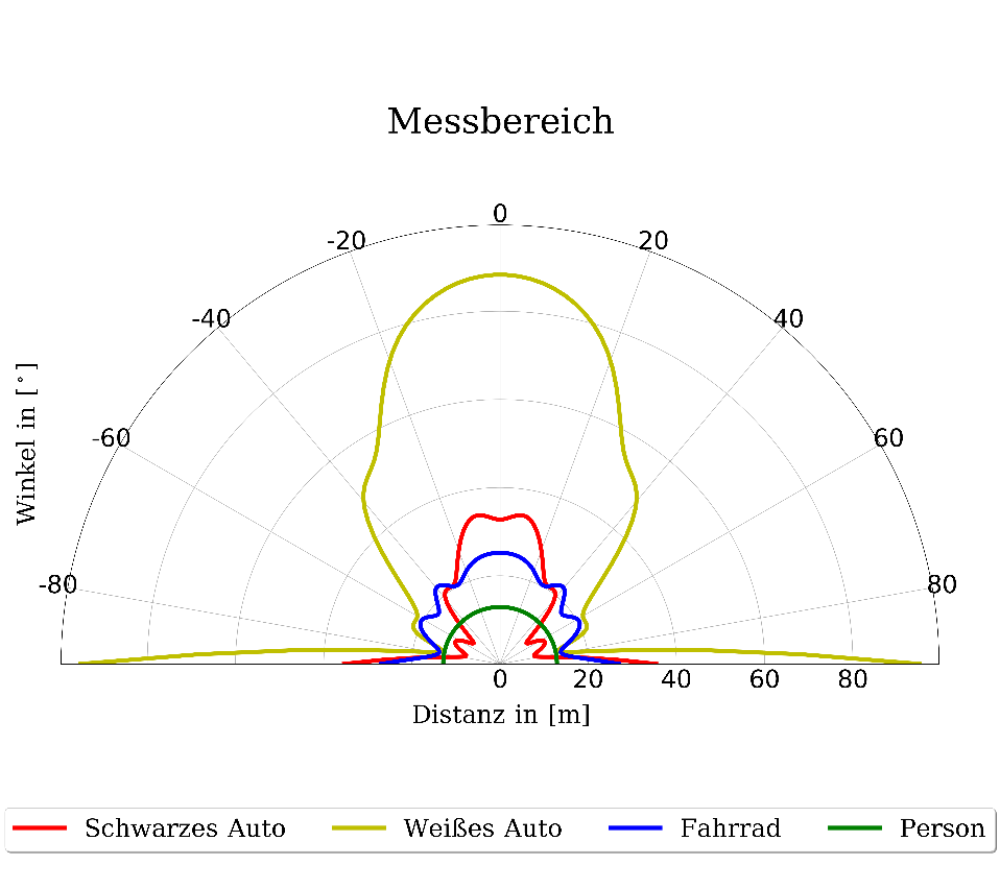
Das Hauptaugenmerk der Objekte liegt bei dynamischen Objekten (Personen, Fahrradfahrer und Fahrzeuge). Für diese wurde der maximale Messbereich aus verschiedenen Messwinkeln bestimmt (siehe Abbildung 1). Es ist erkennbar, dass das weiße Fahrzeug einen deutlich höheren Messbereich aufweist als die anderen Objekte. Zusätzlich wird der Einfluss glänzender Oberflächen deutlich, dies ist insbesondere beim schwarz-glänzenden Fahrzeug erkennbar. Denn obwohl es sich bei einem Fahrradfahrer um ein deutlich kleineres Objekt handelt, ist die maximale Messdistanz relativ ähnlich. Bei der Person wird aufgezeigt, dass der aktuelle technologische Stand von LIDAR noch nicht für höhere Geschwindigkeiten ausreicht.
Verschiedene Outdoor-Bedingungen stellen für LIDAR eine große Herausforderung dar. Starker Regen ähnelt einer imaginären Wand, Messungen bei Gegenlicht werden durch den Infrarotanteil der Sonne beeinflusst und imaginäre Objekte werden detektiert. Insgesamt kann bei verschiedenen Licht- und Witterungsbedingungen mit LIDAR nicht sicher gemessen werden.
RADAR
RADAR ist eine Technologie, welche vor allem bei metallischen Oberflächen sehr hohe Signalstärken erreicht. Der Schwerpunkt der Untersuchung liegt daher bei der Erkennung von nichtmetallischen Oberflächen (z.B. Personen). Da es vor allem zu Schwierigkeiten kommen kann, wenn sich eine Person neben metallischen Objekten (z.B. Fahrzeugen) aufhält, wird das in einem Testszenario überprüft.
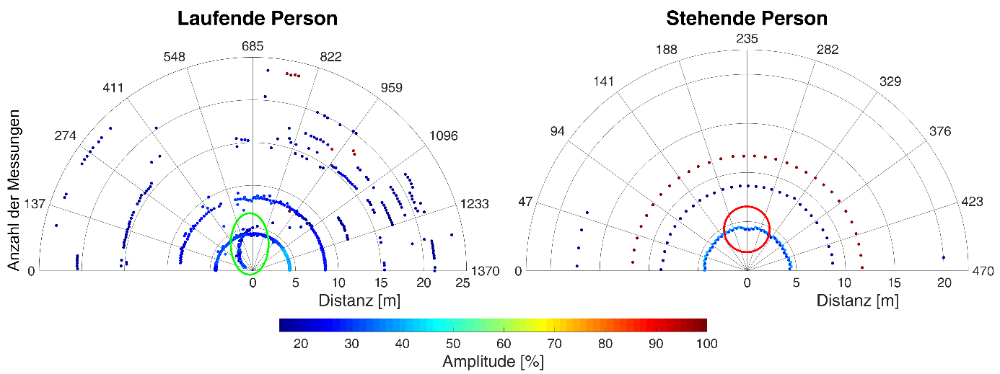
Die Messergebnisse zeigen, dass ein großer Unterschied zwischen stehenden und laufenden Personen vorliegt (siehe Abbildung 2). Die laufende Person wird sehr gut detektiert (grüne Ellipse), während die stehende Person (roter Kreis) nur erahnt werden kann. Somit kann RADAR für Bereiche, in denen sich Personen aufhalten können, nicht absolut sicher eingesetzt werden.
Fazit
Insgesamt kann gezeigt werden, dass die Defizite von LIDAR und RADAR für automatisiertes Fahren bedeutend sind und ohne zusätzliche Sicherheitsmaßnahmen die Risiken zu groß sind. Jedoch sind mit entsprechenden baulichen Veränderungen dennoch geeignete Umsetzungsmöglichkeiten vorhanden. Bei LIDAR könnten diese Defizite durch einen Witterungsschutz (z.B. überdachte Fahrbahn), bei RADAR durch einen ausreichend hohen seitlichen Zugangsschutz gelöst werden. Über Brücken oder gesicherte Übergänge können Personen die Fahrbahn überqueren.
Eine Sensordatenfusion aus LIDAR und RADAR bringt für dieses Projekt keine Vorteile, da eine einzelne Sensortechnologie die Nachteile der jeweils anderen nicht vollständig ausgleichen kann. Folglich ist ebenfalls eine der Sicherheitsmaßnahmen notwendig mit zusätzlich Kosten aufgrund einer größeren Anzahl benötigter Sensoren und komplexer Datenverarbeitung.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter