
Lewin L. Hajer
Auslegung und Erprobung eines reflexbasierten Verfahrens zur Charakterisierung von Heliostaten
Dauer der Arbeit: 6 Monate
Abgabe: Juli 2018
Betreuer: M.Eng. Wilko Jessen, Dipl.-Phys. Christoph Prahl (DLR)
Prüfer: Prof. Dr.-Ing. Norbert Haala
In einem CSP-Turmkraftwerk wird mittels gebündeltem Sonnenlicht Energie erzeugt. Die Bündelung des Sonnenlichts erfolgt durch parabolisch geformte Sonnenspiegel, sogenannte Heliostaten, welche am Boden vor dem Turm positioniert sind. Einfallendes Sonnenlicht wird an den Heliostaten in Richtung eines Receivers auf dem Turm reflektiert, um dort ein Wärmeträgermedium zu erhitzen, welches eine Turbine zur Stromgewinnung antreibt. Für einen möglichst effizienten Betrieb des Turmkraftwerks ist es daher notwendig, dass die Heliostaten zu jeder Zeit so ausgerichtet sind, dass das Sonnenlicht direkt auf den Receiver reflektiert wird. Genaue Kenntnis über die Orientierung der Heliostaten ist daher besonders wichtig.
Bisherige Verfahren zur Orientierungsbestimmung von Heliostaten erweisen sich oft als zu langsam und zu ungenau. Es wird daher ein neuartiges Verfahren erprobt, um die Orientierung eines Heliostaten mit einer angestrebten Genauigkeit von 0.1 mrad zu bestimmen, und um Abweichungen der Spiegelfläche von der Idealform zu detektieren.
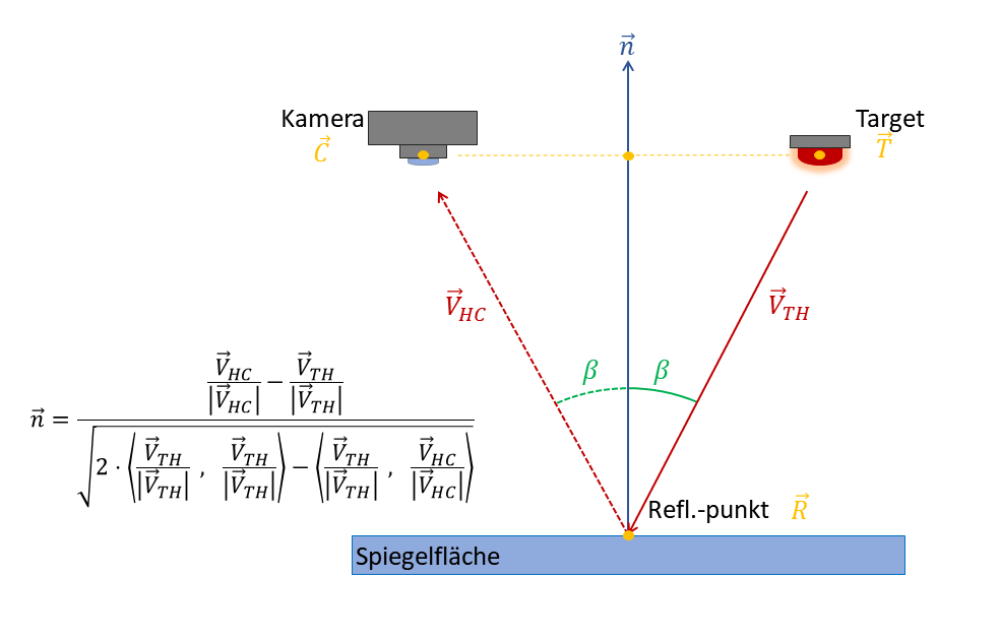
Mittels eines UAVs und einer daran angebrachten Kamera wird das Heliostatenfeld beflogen und erfasst. Nahe der Kamera sind verschiedenfarbige LEDs (Targets) platziert. Bei entsprechender Positionierung des UAVs sind in den aufgenommenen Bildern Heliostaten zu sehen, in denen sich die Reflexion des UAVs, vor allem aber der deutlich sichtbaren LED-Targets befindet (Abb. 1). Bei genauer Kenntnis über die Position von Kamera, Targets, und der Targetreflexion auf dem Heliostaten, kann der Normalenvektor der Spiegeloberfläche am Ort der Targetreflexion über Vektorrechnung bestimmt werden (Abb. 2). Aus den Normalenvektoren können Rückschlüsse auf die Oberflächenform und die Orientierung des Heliostaten gezogen werden, sofern die Reflexionen möglichst gleichmäßig verteilt sind.

Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter