
Zelong Lian
Digital Preservation of Calw Market Square-Lederstrasse by Means of Automated HDS and Photogrammetric Texture Mapping
Duration of the Thesis: 2 years
Completion: May 2018
Supervisor & Examiner: Prof. Dr.-Ing. Dieter Fritsch
Co-Supervisor: Dr. José Balsa-Barreiro
Introduction
Photogrammetry and laser scanning present complementary technologies for 3D model reconstruction. Nowadays, terrestrial laser scanning (TLS) is one of the most important and reliable method to measure the position and shape of objects in the three-dimensional space. Another name for TLS is “High Definition Surveying (HDS)”.
This thesis will cover an approach to reconstruct 3D photorealistic models of outdoors objects by means of automatically georeferenced TLS point clouds and still video images. On the one hand, point clouds are collected using the static laser scanning system Leica Geosystems P20. On the other hand, still video images are used to detect point features, which are also found in the 3D HDS point clouds, and serve for photorealistic 3D models of parts of the historic Market Square – Lederstrasse in Calw, 40 km southwest of Stuttgart.
Fully textured 3D models have great importance in digital preservation of cultural heritage as reference scale models. The 3D models generated in this project will also be used as basic model data for the developments of 3D and 4D Apps. Fig. 1 outlines a snapshot of the Calw VR App, which is developed by Prof. Fritsch, ifp, and M.Klein, 7reasons, Vienna.

Terrestrial Laser Scanning
Terrestrial Laser Scanning is a ground-based device that uses a laser to measure the three dimensional coordinates of a given region of an object’s surface automatically, in a systematic order at a high rate in (near) real time. The TLS instrument used in this project was the Leica ScanStation P20, owned by ifp. The point clouds data was processed in Leica Cyclone software.
Scan points are recorded and saved in a local coordinate system, which is related to the scanner at each station. For 3D reconstructions, a unique point cloud is required, which can be accomplished by transforming point clouds from different scan stations into one coordinate system and merge them together. This procedure is called scan registration.
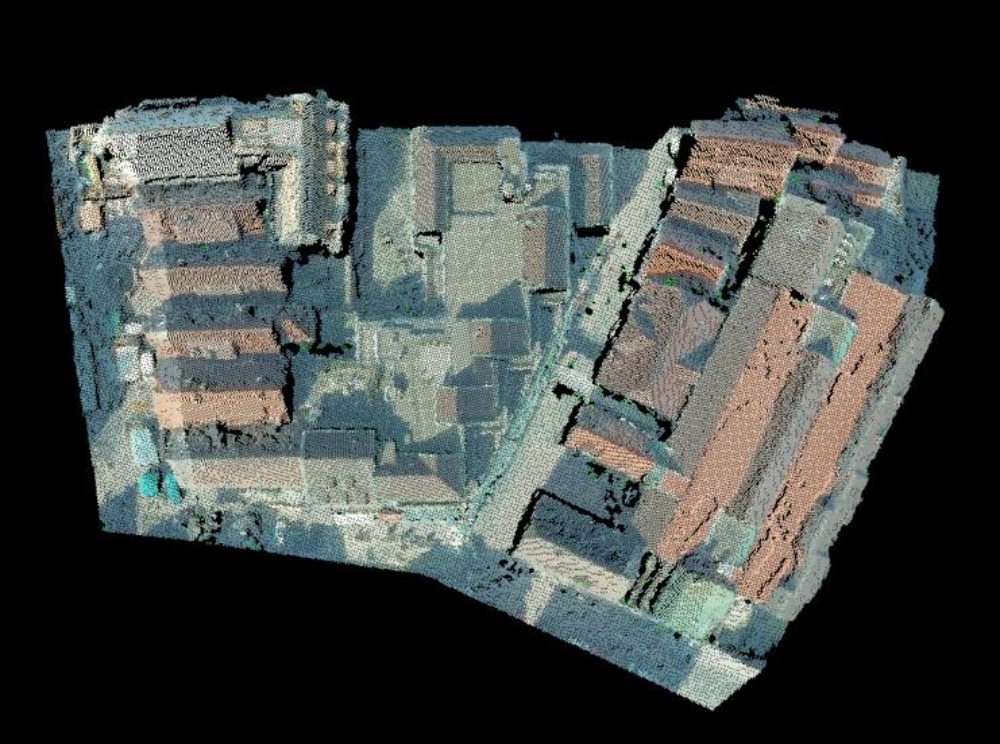
Figure 2 shows the result of registration (noise reduced): Figure

The Leica ScanStation P20 delivered high accuracy point clouds with a mean registration error of 1mm. The quantity and the distribution of control points, the used resolution and the type of target are of great relevance for the result. However, some parts of roof landscapes are missing due to the limitation of the TLS system. Occlusions may also lead to missing data.
In urban surveying, it is unavoidable that missing data occur in certain parts of the building facades because of occlusions derived from the vegetation or other elements (cars, pedestrians). Some other surveying methods need to be introduced to make up the drawback of the TLS system.
Photogrammetry
In general, photogrammetric techniques can be used to generate 3D point clouds from digital images, both close-range and aerial, previously positioned, oriented and rectified. By using photogrammetric techniques, the missing area of the building facades and roof landscapes in the TLS point clouds can be made up. In this thesis, only aerial photogrammetry is used.
In aerial photogrammetry, the point clouds of the missing roof landscapes are generated from aerial photos and the project file. The project file records the orientation and position of each aerial image. For this thesis we applied the SURE software to derive the rectification of each image, to accomplish the very dense image matching and forward intersection of each pixel. Thus, a very dense point cloud of the missing roof landscapes could be obtained.
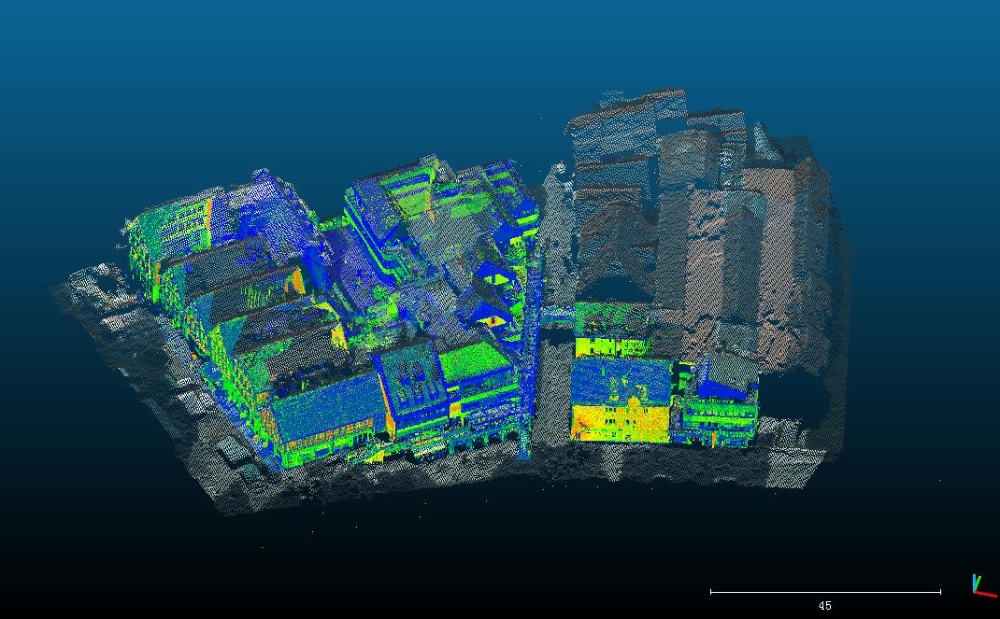
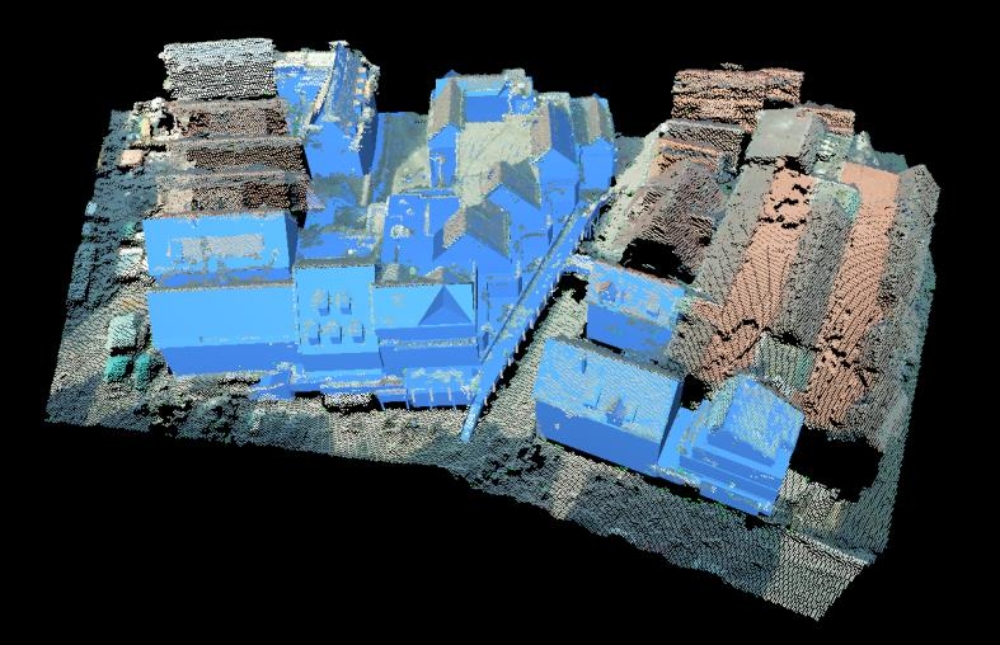
The point clouds generated by aerial photogrammetry, which is georeferenced in Gauss-Krüger coordinates, is used as georeference for the other point clouds through a process called transformation. The combination of point clouds obtained with the different techniques (TLS and photogrammetric images) lead to the generation of a complete (and unique) point cloud, which is used for 3D modeling. Previous to this combination, the different point clouds should be matched in position, orientation and scale.
For this purpose, a 3D Helmert transformation and the Iterative Closest Point (ICP) algorithm were used to obtain an accurate registration. The registration was implemented in the software CloudCompare (see Fig. 4).
3D Modeling
The 3D reconstruction of the complete point cloud is performed by using Leica Cyclone software. This software provides some modeling tools, which can generate different geometries and surfaces to match the original shape of the registered point clouds (see Fig. 5 and 6).

Texture Mapping
The CAD model generated by Cyclone only performs the basic shape features of the buildings. Thus, the texture mapping should be done to make the model more photorealistic. This procedure can be also accomplished in SketchUp software.
For wrapping the textures onto the model, the images were rectified and those with less distortion are used. Adobe Photoshop can adjust photo settings, and select the suitable area of each building (see Fig. 7 and 8).


Conclusion
High definition surveying (HDS) is applied to reconstruct a 3D photorealistic model of parts of the City of Calw. Terrestrial Laser Scanning by using the Leica ScanStation P20 can get very high accurate point clouds with registration error of 1mm. This result has great relevance to the number and spatial distribution of control (target) points, as well as the scanning resolution of the interested area.
Photogrammetry is a good method to make-up the drawbacks of HDS. Due to the inconvenience and limitation of Terrestrial Laser Scanning, some information cannot be collected by TLS. Photogrammetry can almost repair all the missing area of the TLS. TLS is a very stable and accurate method for point cloud acquisition. And Photogrammetry is a more flexible and convenient method compared with TLS. By combining the two methods together, complete point clouds of buildings, building blocks and neighboring areas can be delivered. Here, the quality of a combined registration of TLS data and photogrammetry is very important. By using a Helmert transformation and the ICP algorithm a result with a mean error of 0.114m could be obtained. This quality can still be improved by using different methods in further research.
In research terms, the future challenges are the automation of the process, the reduction of the times required and the minimization of the manual workload.
The 3D/4D photorealistic models generated in this project can be used in a number of possible applications in archeology, architecture, geography, civil engineering, etc. The approach used in this project can be a good reference for other modeling practices.
Ansprechpartner

Dieter Fritsch
Prof. Dr.-Ing.Professor im Ruhestand