Tatjana Immel
Analyse von Wettereinflüssen auf LiDAR-Sensoren für autonomes Fahren
Dauer der Arbeit: 6 Monate
Abgabe: April 2018
Betreuer: Robin Heinzler (Daimler AG)
Prüfer: Prof. Dr.-Ing. Norbert Haala
Für das autonome Fahren ist eine zuverlässige Umfelderfassung Voraussetzung. Dazu ist es notwendig alle äußeren Einflüsse der Umgebungssituation präzise zu erkennen. Hierzu zählen sämtliche Arten von Witterungsbedingungen. Als Sensor für ein autonom fahrendes Fahrzeug kann LiDAR (Light Detection And Ranging) einen breiten Nutzen anbieten, um die Umgebungserfassung zu vervollständigen. Aufgrund der Wetterempfindlichkeit des LiDAR-Sensors, wurden die vorliegenden Analysen zur Erkennung von Witterungsbedingungen anhand der Punktwolke eines LiDAR-Sensors durchgeführt. Das Hauptaugenmerk lag dabei auf der Unterscheidung der drei Wetterzustände: klare Sicht, Regen und Nebel. Für eine qualifizierte Analyse der Einflüsse verschiedener Wetterzustände auf einen LiDAR-Sensor ist es essentiell wichtig, die Auswirkungen auf die empfangene Punktwolke zu kennen, damit nachfolgende Algorithmen gegenüber diesen Auswirkungen robust sind. Die untersuchten Wettereinflüsse konnten mittels einer Merkmalsextraktion für eine Klassifikation genutzt werden.
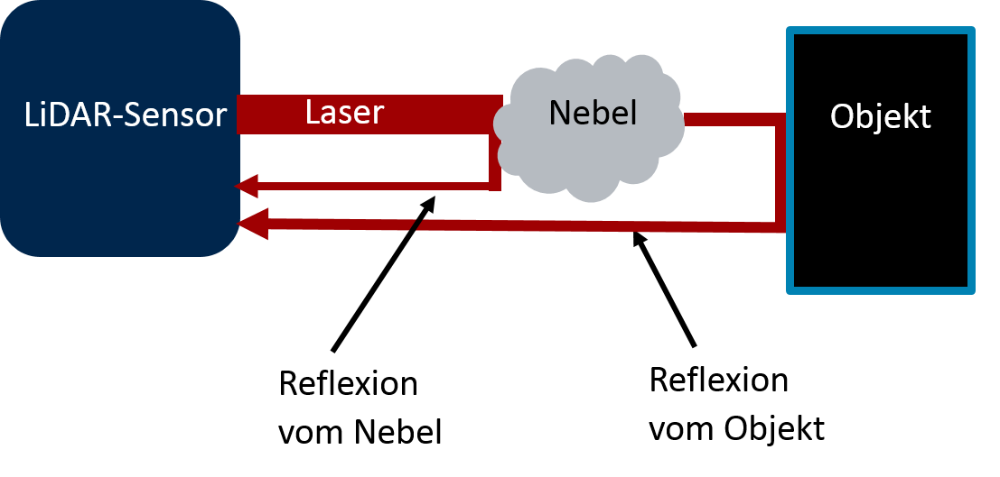
Die Interaktion des gepulsten Laserstrahls mit Nebel ist in der Abbildung 1 dargestellt. Trifft der Strahl auf Nebel, wird das Infrarotlicht transmittiert und teilweise absorbiert. Durch die Reflexion empfängt der LiDAR-Sensor ein erstes Signal des ausgesandten Laserstrahls zurück. Ein Teil des vom Nebel transmittierten Lasers kann auf ein dahinterliegendes Objekt treffen, welches das Signal ebenfalls reflektiert.
Verfügt ein LiDAR-Sensor über ein Multi-Echo-System, lässt sich für die empfangene Punktwolke ein Merkmalsvektor hinsichtlich der Echos generieren. Anhand der Anzahl der verschiedenen Echos kann Nebel von klarer Sicht unterschieden werden, denn das erste Echo resultiert hauptsächlich von Wassertöpfchen des Nebels, wohingegen weitere Echos von dahinterliegenden Objekten stammen können. Im Gegensatz dazu wird bei der klaren Sicht meist nur ein zweites oder drittes Echo erhalten, wenn der Laserstrahl auf hintereinander liegende Objekte trifft.
Ein nächstes markantes Merkmal bietet die Anzahl der Rückstreupunkte. Wird die aufgenommene Szene in Boden-, Raum- und Nahfeldpunkte eingeteilt, ist zu erkennen, dass die Boden- und Raumpunkte bei Nebel geringer werden, wohingegen die Nahfeldpunkte zunehmen. Wird das komplette Szenario betrachtet, kann eine ähnliche Punktanzahl für den Zustand der klaren Sicht und des dichten Nebels mit einer Sichtweite von 10 bis 20m festgestellt werden. Das hängt mit der direkten Reflexion des Nebels in unmittelbarer Nähe des Sensors zusammen.
Eines der wohl stärksten Merkmale ist die mittlere Intensität der zurückempfangenen Punktwolke. Es ist eine deutliche Abnahme der Intensitäten bei einer Nebelumgebung festzustellen, da das Signal bei Nebel deutlich ausgedehnter und flacher wird. Die Echopulsbreite hingegen ist bei klarer Sicht kleiner und bei Nebel größer.
Anhand der geometrischen Ausdehnung des Messbereichs können bis zu drei weitere Merkmale definiert werden. Die Berechnung der Eigenwerte geben Aufschluss über die Reichweite des Lasers in drei Dimensionen. Über die Eigenwerte kann die Ausdehnung des Messbereichs erhalten werden, welcher bei klarer Sicht einem gestreckten Zylinder gleicht. Wohingegen bei Nebel die Eigenwerte ähnliche Größenverhältnisse erhalten, da die Rückstreupunkte aus einem kugelförmigen Bereich empfangen werden.
Ein weiteres Merkmal ergibt sich aus den Änderungen der Azimutwinkel. Für eine Nebelsituation entsteht eine Gleichverteilung hinsichtlich der Anzahl der auftretenden Winkel.
Mit den statistischen Methoden des Mittelwerts und der Varianz lassen sich weitere Merkmale berechnen. Diese liefern je nach Durchschnitt und Streuung der Datenpunkte unterschiedlich starke Merkmale.
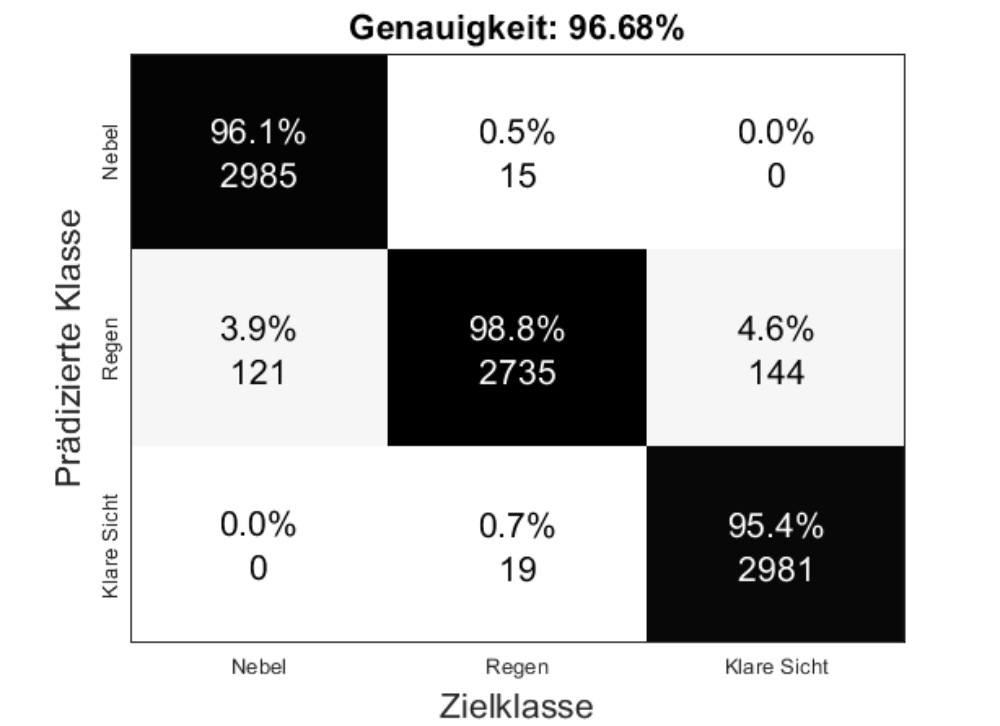
Wie in Abbildung 2 zu erkennen ist, kann die Unterscheidung der drei Klassen, Nebel, Regen und klare Sicht, mit einer Genauigkeit von 96.68% erfolgen. Es kommt zu wenigen Fehlklassifikationen hinsichtlich des Regens, da sich der Merkmalsvektor nicht klar zu trennen scheint von den anderen beiden Klassen. Nebel und Klare Sicht hingegen liegen im Merkmalsraum weit auseinander. Dargestellt ist die Konfusionsmatrix nach der Klassifikation mittels Random Forest. Gegenüber K-Nearest-Neighbor und Support Vector Machine lieferte Random Forest bessere Ergebnisse. Außerdem überzeugte diese Methode durch eine kürzere Rechenzeit und einen geringeren Speicheraufwand.
Mit dieser umfassenden Analyse konnten die Wettereinflüsse auf die Rohdaten eines LiDAR-Sensors gezeigt werden. Durch die sorgfältige Merkmalsextraktion der in einem Klimakanal generierten Daten, konnten einerseits viele Merkmale gefunden und andererseits eine zuverlässige Validierung vorgenommen werden. Anhand der aus Punktwolken generierten Merkmalsvektoren lässt sich eine Wettererkennung mittels geeigneter Klassifikationsverfahren vornehmen. Allerdings muss eine differenzierte Betrachtung der Zustandsbestimmung vorgenommen werden. Aus verschiedenen aufgenommenen Szenen ließ sich herausfinden, dass Zustände aus trainierten Daten derselben räumlichen Umgebungsbedingung mit hoher Sicherheitswahrscheinlichkeit validiert werden können. Die Verifizierung auf neue Umgebungssituationen bereitet dem Algorithmus hingegen Schwierigkeiten. Weitere Genauigkeitssteigerungen können durch Trainingsdaten aus realen Straßenumgebungsbedingungen erwartet werden.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter