Chun-Yu Sheu
Automatic 3D lane marking reconstruction using multi-view aerial imagery
Duration of the Thesis: 6 months
Completion: April 2018
Supervisor: Dr.-Ing. Franz Kurz (Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR))
Supervisor & Examiner: Prof. Dr.-Ing. Norbert Haala
The 3D information of road infrastructures is gaining importance with the development of autonomous driving. The exact absolute position and height of lane markings, for example, support lane-accurate localization. Several approaches have been proposed for the 3D reconstruction of line features from multi-view airborne optical imagery. However, standard appearance-based matching approaches for 3D reconstruction are hardly applicable on lane markings due to the similar color profile of all lane markings and the lack of textures in their neighboring areas. This thesis presents a workflow for 3D lane markings reconstruction without explicit feature matching process using multi-view aerial imagery. The aim is to optimize the best 3D line location by minimizing the distance from its back projection to the detected 2D line in all the covering images.
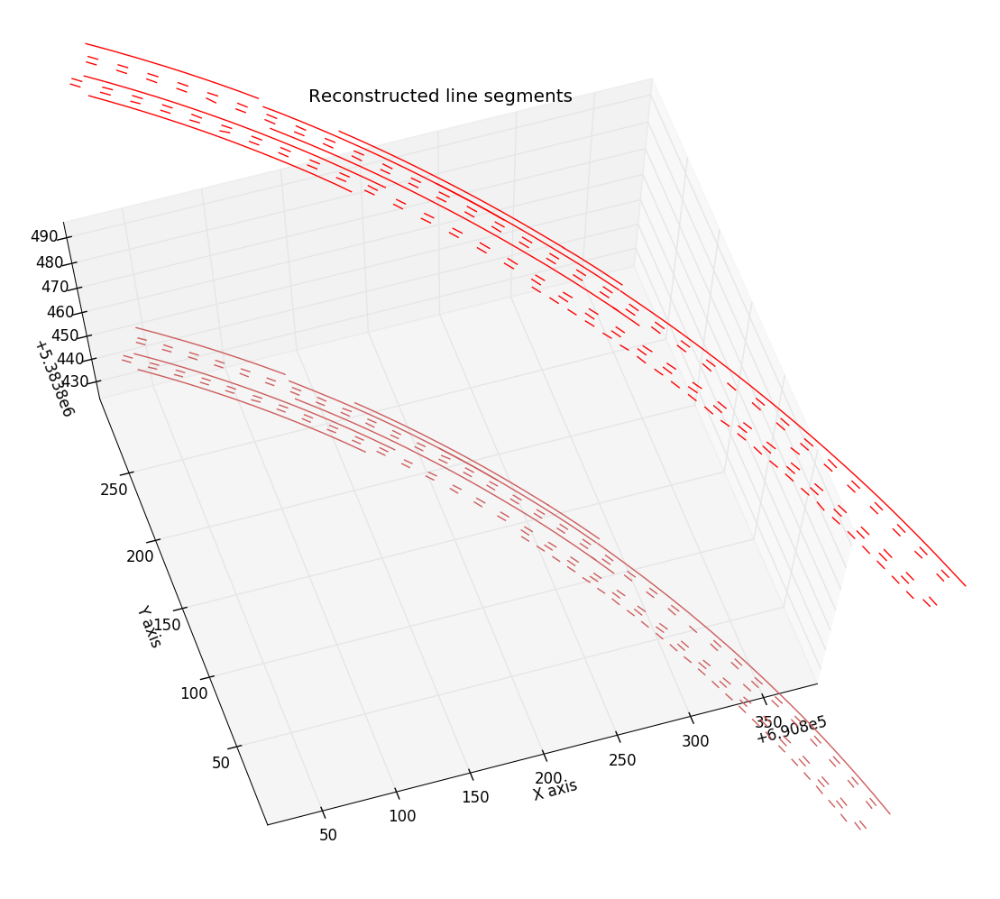
Firstly, the lane markings are automatically extracted from aerial images using standard line detection algorithms. By projecting these extracted lines onto the Semi-Global Matching (SGM) generated Digital Surface Model (DSM), the approximate 3D line segments are generated. Starting from these approximations, the 3D lines are iteratively refined based on the detected 2D lines in the original images and the viewing geometry.
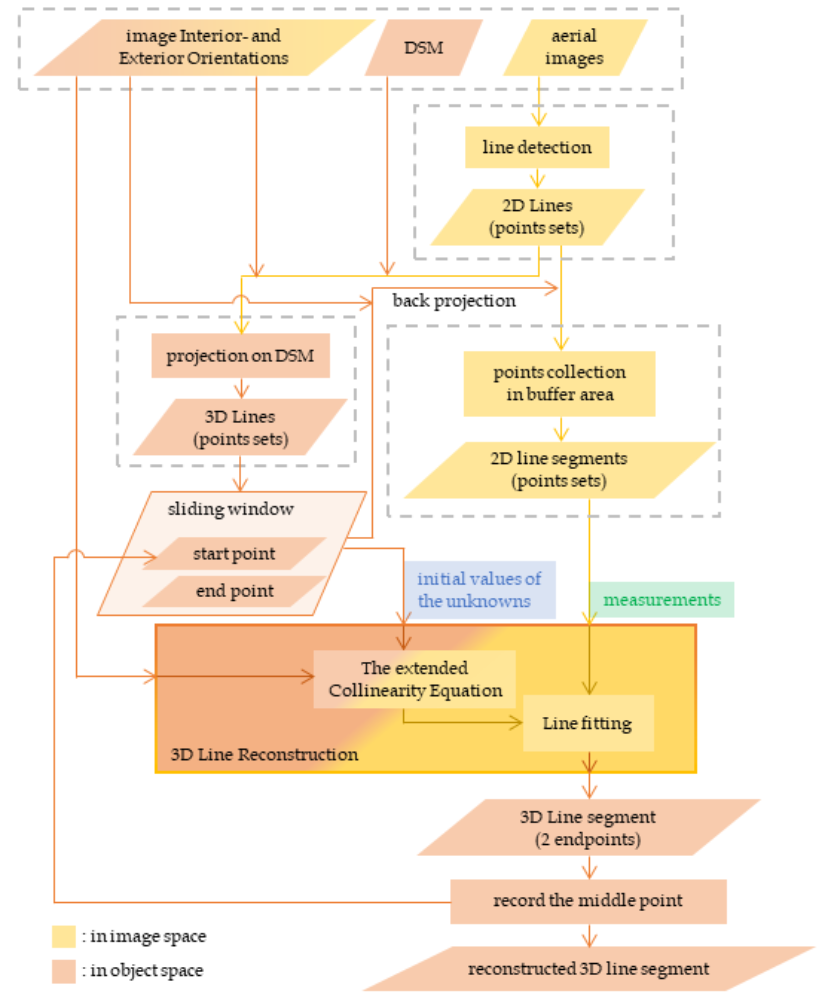
The proposed approach relies on precise detection of 2D lines in image space, a pre-knowledge of the approximate 3D line segments, and it heavily relies on image orientations. Nevertheless, it avoids the problem of non-textured neighborhood and is not limited to lines of finite length. The theoretical precision of 3D reconstruction with the proposed framework is within 2.5 cm in vertical direction and within 5 mm in horizontal direction.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter