Zhan Kun
Dynamic And Accurate Image Feature Extraction for Camera calibration
Duration of the Thesis: 6 months
Completion: January 2018
Supervisors: Matthias Küver & Mehrdad Nekouei Shahraki (Robert Bosch GmbH)
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
The increasing demand for using different kinds of cameras in Advanced Driver Assistance Systems calls for accurate and efficient calibration before put into use. In this master thesis, maker extraction algorithm is mainly focused for calibration with a 3D spiral arranged test field.
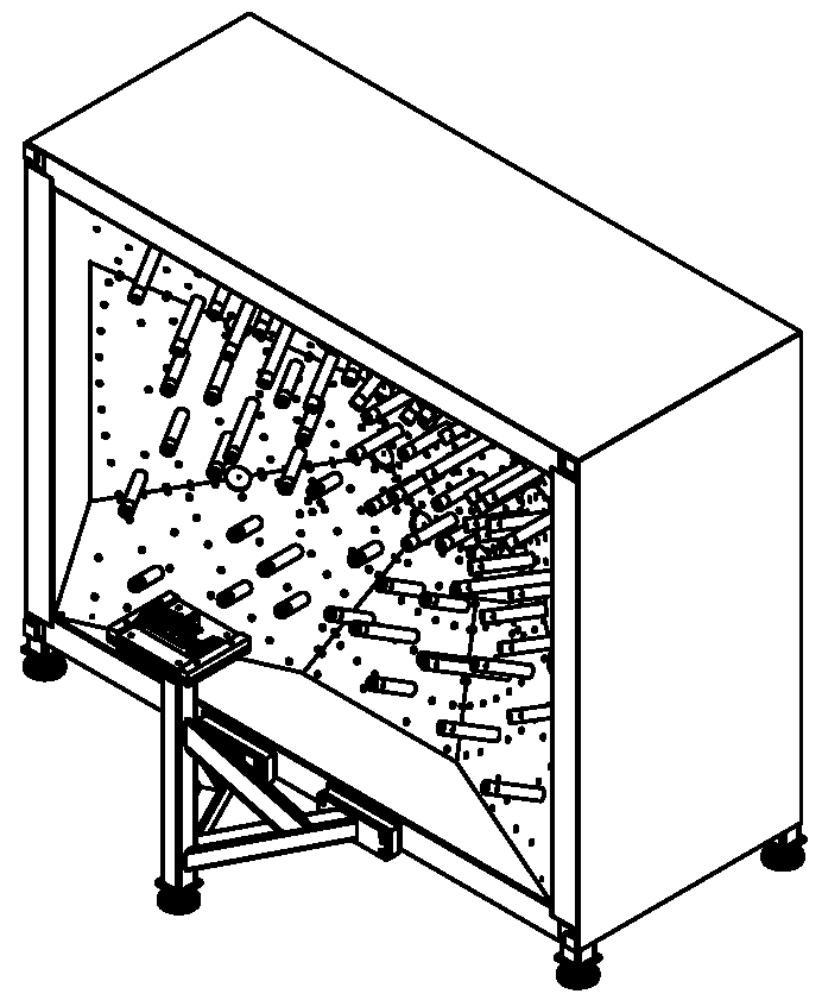
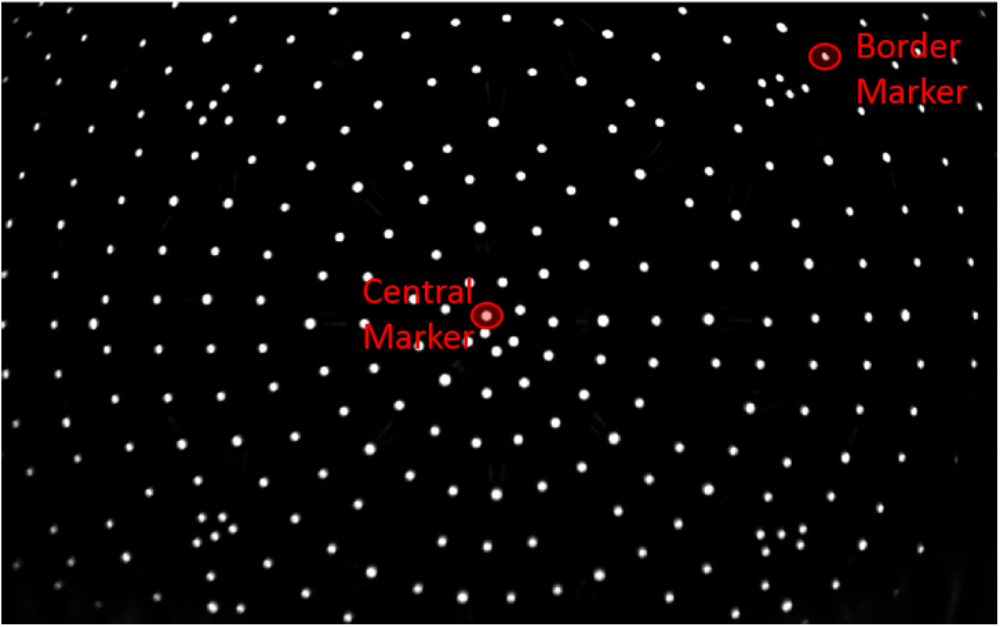
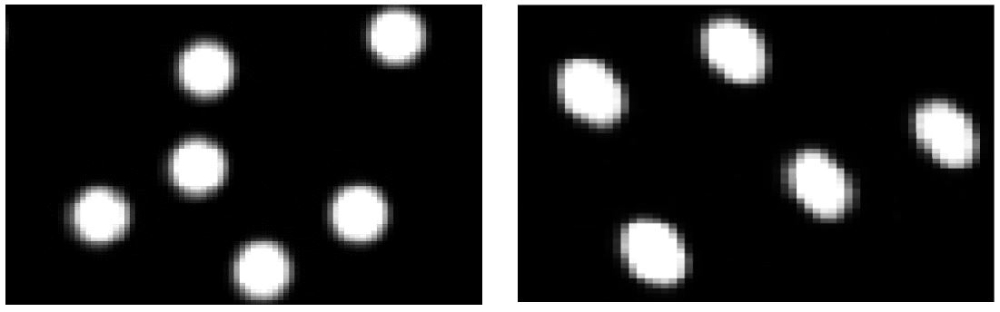
The markers of the test field projected in the image plane have different distortion. Therefore marker extraction, which realized by template matching in the work, needs specific created masks making use of available 3D information of the test field and also the initial intrinsic/extrinsic parameters.
The workflow of whole calibration process applying the masks are displayed as the workflow chart,
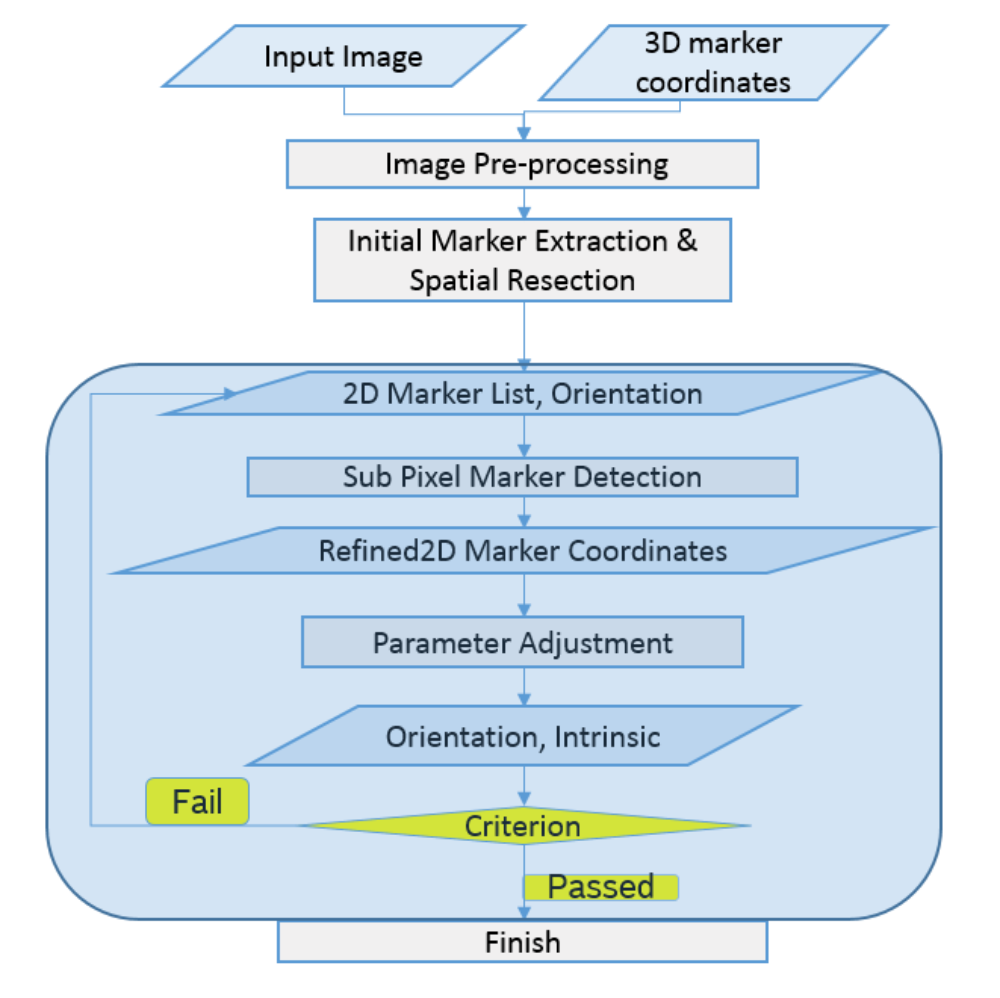
Finally the result says that the algorithm gives improvement but limited.

For the outlook of the thesis, it can be concluded that except marker extraction algorithm, other factors like local lens distortion, camera model modelling power as well as image quality should be further considered.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter