Mariam Bashir
Indoor Positioning for Warehouse Logistics
Duration of the Thesis: 6 months
Completion: March 2017
Supervisor: Dr.-Ing. Volker Walter
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
Over the past 50 years, the world has seen an unprecedented growth in technology. From processing units taking up an entire room to sleek and slim smartphones with attractive displays, we have certainly come far.
Parallel to other sectors of technology, positioning systems took the front in our daily lives with the introduction of GPS (Global Positioning system) for civilian users in 1991 [1]. Looking past, the industrial application of this system, its integration in hand held devices has immensely facilitated the process of travelling for a common man.
GPS operates using the microwave signals transmitted by satellites in its range. These signals are greatly exhausted by the surrounding atmosphere. While advanced noise reduction algorithms have made it possible for an average mobile GPS to have an accuracy range of 8 to 15meters outdoors, they effectively fail to help indoors.
Among many other, a proposed solution is to leverage the mobile sensors like accelerometer, camera, GSM, Bluetooth to boost the accuracy of weak GPS signal received indoor [1]. However, after sufficient tests, it is an established fact, that a plausible accuracy of 1-3 meters cannot be achieved without alternative sources of signals.
More like a satellite for inside the walls, Radio frequency transmitters have come across as a potential solution, WLAN and Beacon Technology. Before diving deep into the technicalities, we must first have a crisp understanding of indoor positioning and Navigation.
Concept and Aim
Every generation of commercial technology has evolved to improve the productivity and efficiency across any and every associated workflow. Quite naturally, time and cost optimization is paramount to any number of related activities. The clock does not just tick the seconds, it moves the revenue and defines the way forward.
The management of products in large warehouse facilities is influenced greatly by time. The workers responsible for placing and fetching the products waste an ample amount of time trying to locate them or finding a location to place them. This also leads to an increase in the capital being spent as more people are needed to finish the tasks in time.
A closer understanding of the problem above reveals the two main contributors which are, navigation and location awareness. Outdoor navigation and positioning has seen unprecedented growth over the past decade. From massive improvements in satellite navigation to cellular networks adding another dimension, navigating outside the bounds of your walls is taken care of. It is the concept of indoor positioning and navigation that has taken birth fairly recently and is the potential solution here. Indoor Positioning and Navigation systems guide the subject inside a building or room using one or many technologies to estimate the location.
However, current indoor positioning systems focus on presence detection and have become limited to concepts such as geofencing. Even with bluetooth low energy beacons, they can detect if a sensor is within a large and soft range but not with enough accuracy that can be practically leveraged for use in finer tasks of the industry.
The insufficient accuracy of these systems across devices and locations has adversely affected their widespread utilisation.
This research topic aims at addressing the problem of accuracy by investigating into more optimal strategies for designing an indoor positioning system. The proposed methodology uses a combination of inputs with a carefully designed processing protocol to get a final result that is substantially more accurate.
Methodology
The methodology begins with acquiring resources needed for implementing an indoor positioning system to setting their configuration and finally using their output for the algorithm. It can be broadly divided into two main phases
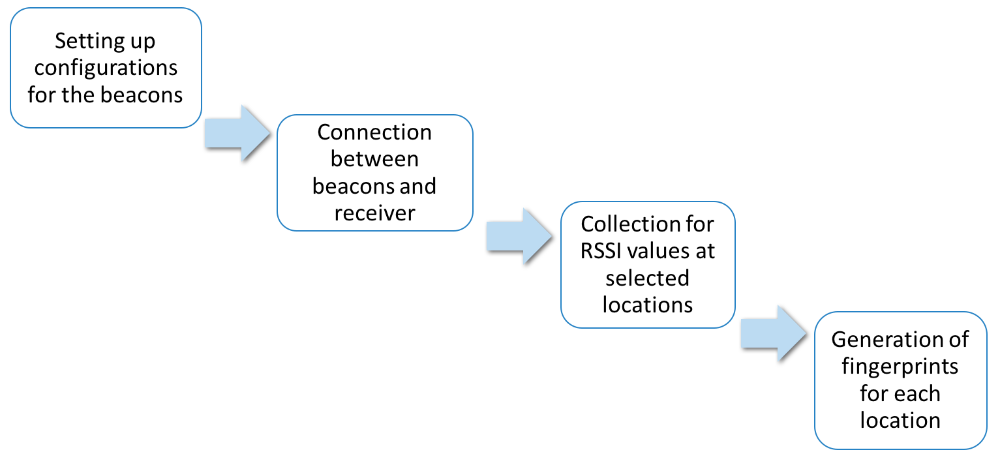
1. Preparation
The preparation phase can also be understood as the offline phase. This phase will include finishing the basic tasks that will help build the foundation for an indoor positioning systems. This step is crucial to the accuracy of the positioning phase or in simpler words the online phase.
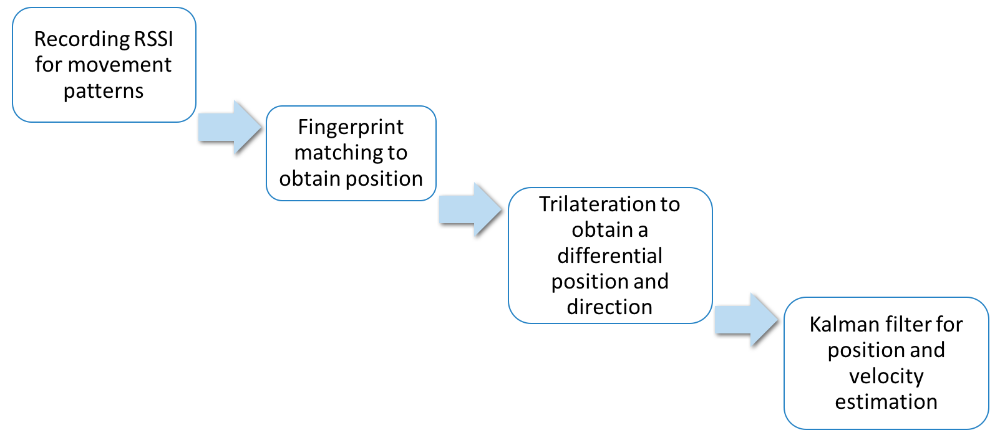
2. Positioning
The positioning phase will use the real time RSSI value and match them with the data prepared in the phase before to estimate the position of the user.
Results
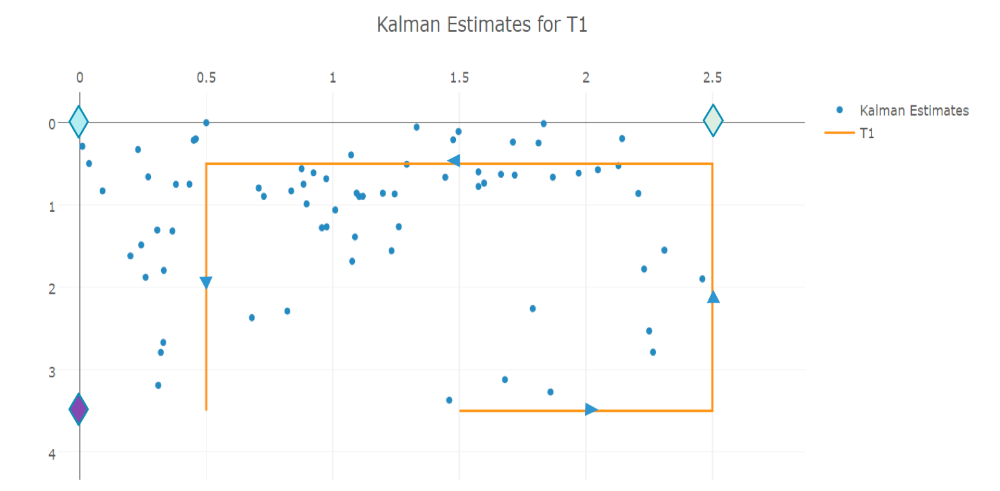
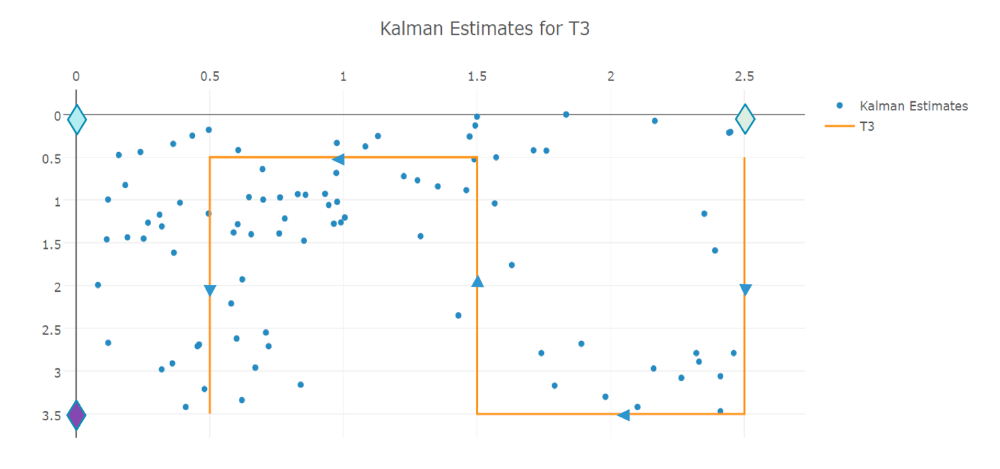
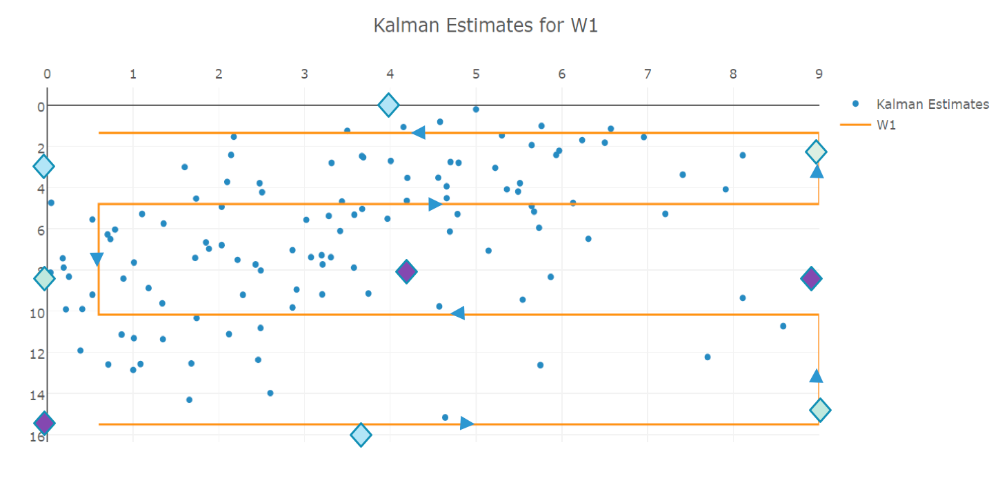
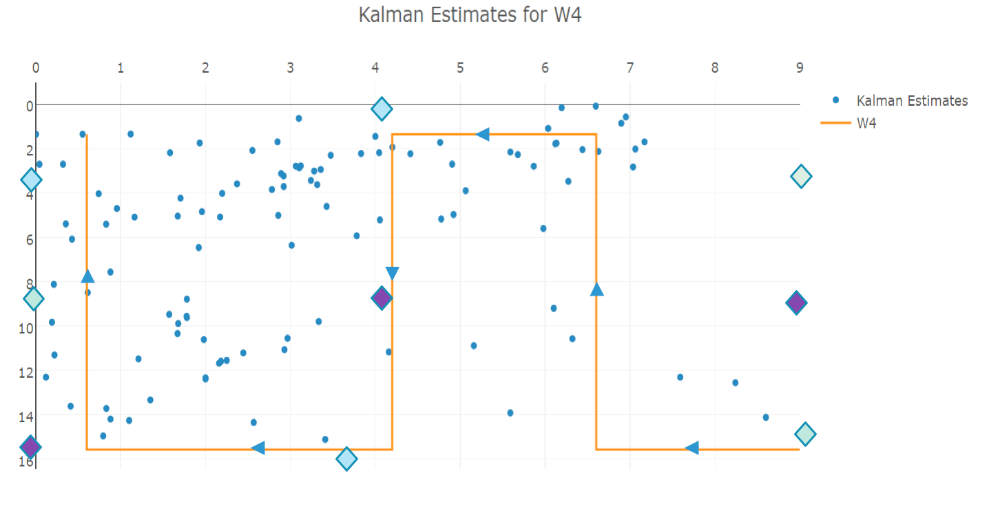
The table below summarises the obtained result for the test location and the ware- house. The dimensions of the test area are 3.5 meters x 2.5 meters and that of the warehouse are 9 meters x 16 meters. The RMSE is the root mean square estimate for distance of each point from the movement line. The point with the maximum deviation from the movement line is also shown in the summary to shape an idea of the error range. A visualization of the results is shown in the figures below.
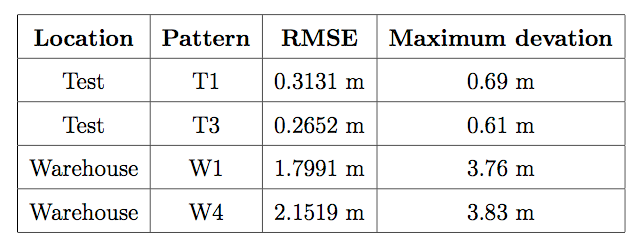
Result Summary
Improvements and Conclusion
There are a number of improvements that may boost the accuracy of indoor positioning performed with the approach discussed in this thesis.
- Transmitter devices or beacons with a stable signal.
- Amalgamation with WiFi signals to pass data through more filters.
- Collection of fingerprint data at smaller distance and variable time interval to understand the distribution better.
- Collection of large fingerprint datasets to feed as training data to a neural network and use an approach with a focus towards machine learning.
- Use of advanced bayesian techniques like an Extended Kalman Filter (EKF) and Rao Blackwellized Particle Filter (RBPF).
It can be concluded with certainty that positioning with a moderately average accuracy is possible with the present transmitter technologies that support indoor positioning and the proposed algorithm. However, it will be quite difficult to make such a system usable where realtime positioning with metric accuracy is a requirement. The system can be improved as mentioned in the previous section but a fundamental uplift in transmitter technology dealing with indoor positioning systems is required as the first step.
Bibliography
- [Pace et al.(1995)Pace, Frost, Lachow, Frelinger, and Fossum] S. Pace, G. Frost, I. Lachow, D. Frelinger, and D. Fossum. The global positioning system: as- sessing national policies. Technical report, DTIC Document, 1995.
Ansprechpartner

Uwe Sörgel
Prof. Dr.-Ing.Institutsleiter, Fachstudienberater