Paul Ignat
3D indoor mapping using NavVis M3 Trolley data – an empirical study
Duration of the Thesis: 6 months
Completion: February 2017
Supervisors: M.Sc. Lavinia Runceanu, Dr.-Ing. Michael Cramer
Co-Supervisor: M.Sc. Daniel Fitz
Supervisor & Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
Nowadays, the three-dimensional representation of a site, office building, industrial hall or even historical heritage has become a very common and efficient method of modeling, analysis, visualization, supporting architecture, construction, facility management and building information management industry. The digital indoor models of buildings contribute to the development of approaches in the field of interior design, modeling and building information management.
Related to the high research interest in the indoor mapping, navigation and positioning topic, the 3D interior models are of a great importance. One important part of this process is represented by the instruments that are used during the data acquisition. The M3 Trolley is an innovative instrument, integrating software and hardware in such way that it delivers 3D output (point clouds) of the indoor environments of the buildings. In order to choose the best solution before starting a project, it is important to know the differences, advantages and disadvantages between the available options.
Investigations
The noise level of the output (point clouds) resulted after data acquisition is another parameter which will be approached during this empirical study. Different methods of noise removal will be tested (automatic remover from M3 Trolley, SOR filter from Cloud Compare, implementation in Math Lab) and the level of noise from different point clouds will be compared. This may conduct to a reduction of the size of data due to the outliers’ removal and an easier manipulation of the point clouds during the post processing.
The noise level of the output (point clouds) resulted after data acquisition is another parameter which will be approached during this empirical study. Different methods of noise removal will be tested (automatic remover from M3 Trolley, SOR filter from Cloud Compare, implementation in MatLab) and the level of noise from different point clouds will be compared. This may conduct to a reduction of the size of data due to the outliers´ removal and an easier manipulation of the point clouds during the post processing.
| Number of removed outliers | Percentage [%] of outliers removal | |
| MatLab | 117353 | 76.9 |
| SOR filter | 120568 | 79.3 |
|
Trolley software |
72107 |
47.8 |
| Table 1 – Noise reduction algorithms | ||
Acquiring data with different sensors may handle to differences between point clouds. Therefore, a comparison between point clouds obtained from different sensors will be performed and also the accuracy of 3D representation will be analyzed.
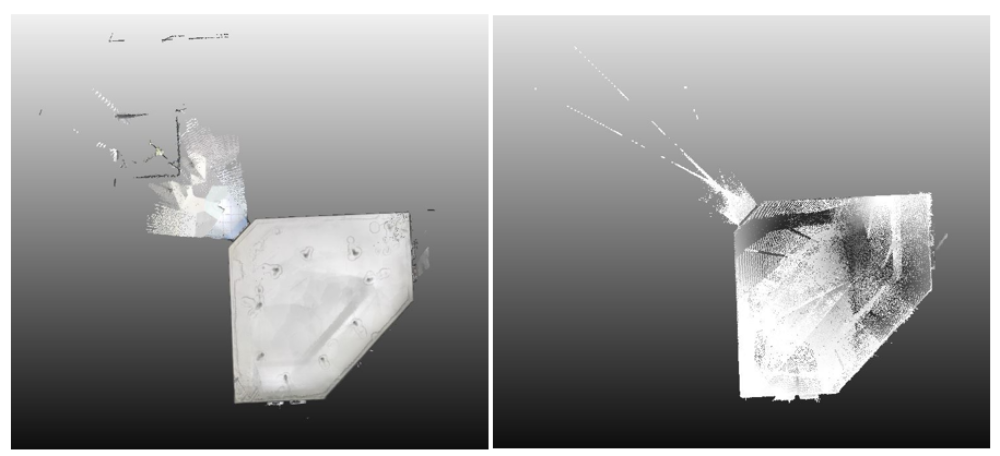
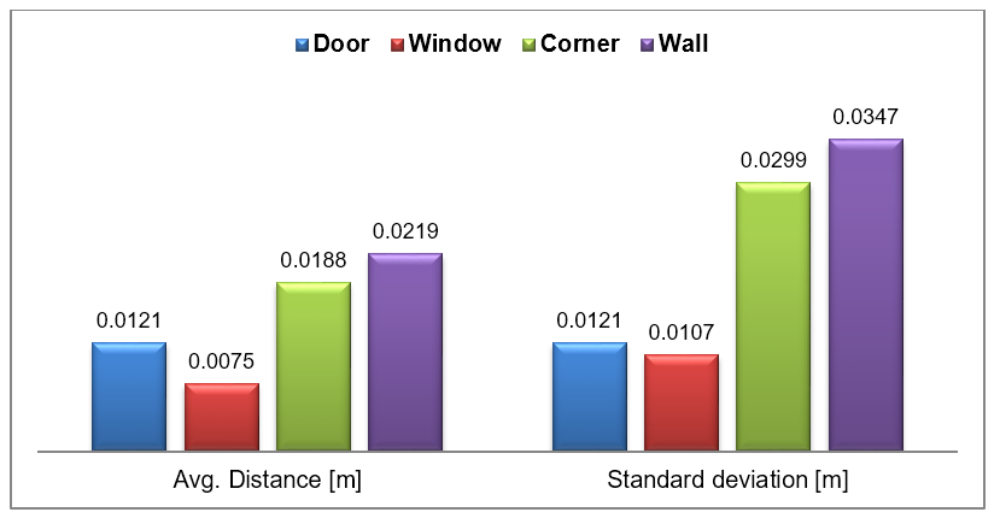
In the next graphs, differences between different parts of the building are shown. Two point clouds obtained after the data acquisition with two different instruments are compared.

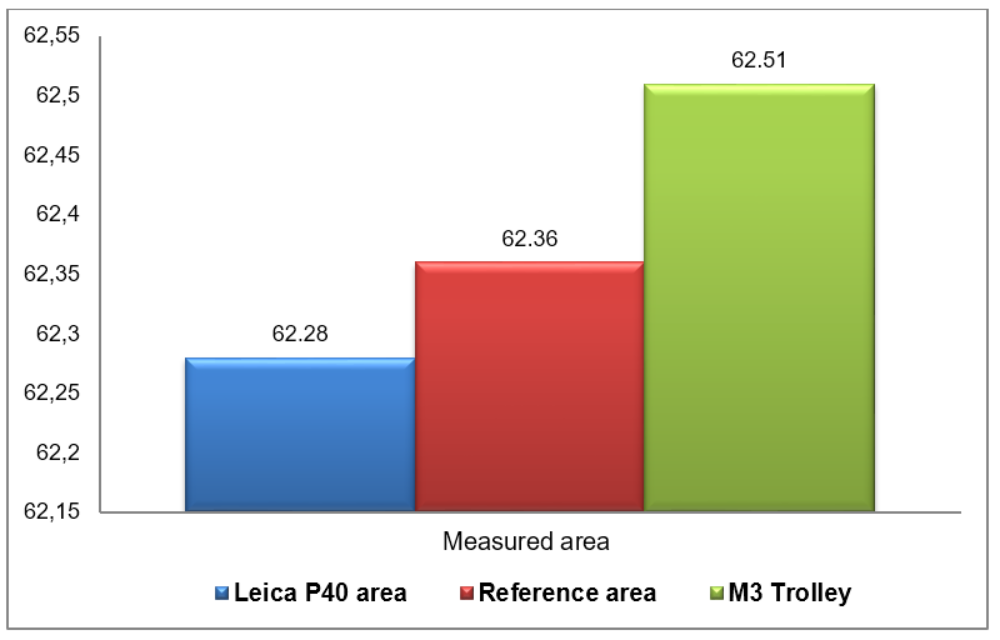
The measurements may have as main purpose the determination of used areas within a building. Therefore, a small investigation about this problem was made. As an example, the reference surface of the room 004 was taken – 62.36 m². Using the Revit Autodesk software, the borders of the point clouds were digitized and the measured area could be computed. The measured area by Trolley was 62.51 m² (0.15 m2 difference from reference), while the same area obtained from Leica’s measurements was 61.28 m² (0.08 m2 difference from reference). Analyzing the point clouds of the same area from Leica P40 and M3 Trolley, it can be deduced that the output obtained from Trolley contains more errors (visually) than the point cloud obtained from Leica, regarding the representation’s accuracy of corners. The curvature of corners is much more visible in the Trolley’s point cloud. One explanation of this phenomenon could be the algorithms that are processing the point cloud; the tendency of smoothing 90° areas. Of course, in this case the errors that could appear while digitization should also be considered.
Looking at the data processing step, one of the main objectives is the registration of the point clouds. The accuracy of automatic methods (M3 Trolley), semi-automatic (Leica Scanner) and manual methods (Trolley + Leica Scanner) will be tested on the same data in order to investigate the accuracy of the registration.

Conclusions
During the data acquisition, the scanner was the most inflexible instrument, from all of those three. Therefore, in order to obtain an efficient area’s coverage without lack of information, a higher number of stations is needed, and in conclusion, more time and higher costs. Comparing the point clouds from Trolley and Leica P40 it can be seen that centimeter differences were obtained. After processing and comparing the data from Trolley and Tango Tablet, it can be concluded that the differences between the two point clouds are bigger than in the Trolley – Leica P40 comparison.
Regarding the registration, the manual methods, combined with automatic ones, millimeter accuracy can be achieved good results, using the Pick Point method + Iterative Closest Point as a complementary algorithm. Taking into consideration the cost parameter, it can be concluded that the M3 Trolley and Leica P40 represent expensive but powerful indoor mapping solutions. Even if is a low cost device, the Tango Tablet is able to map an indoor environment with an acceptable and comparable quality and accuracy with the other two used instruments.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter