Samer Karam
3D-Building Reconstruction with Different Height Levels from Airborne LiDAR Data
Duration of the Thesis: 6 months
Completion: January 2017
Supervisors: Dr.-Ing. Tahmineh Partovi (DLR, IMF-PBA), Prof. Dr.-Ing. Peter Reinartz (DLR, IMF-PBA)
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
More than 50% of the world population inhabit in urban or suburban areas, thus detailed and up-to-date building information is of great importance to every resident, government agencies, and private companies (utilities, real estates and etc.). 3D city models become increasingly important
and necessary for supporting numerous applications such as crisis management, urban planning and so on (Verma u. a. [2006]). As LiDAR (light detection and ranging) considers a superior technology for 3D data acquisition from Earth’s surface and delivers point clouds with high quality. This research is conducted by merely utilizing LiDAR data of an interested area without another data sources such as a cadastral map or photogrammetric aerial images. In this thesis, a developed automated data-driven approach is proposed 3D building models from airborne LiDAR data starting from segmentation of the point cloud, extracting roof patches and ending with regularization of the patches boundary to extract 3D model. Unlike photogrammetry, it is well known that LiDAR data does not record exact position of the edges of buildings. So the first challenge in this research is to extract a relatively accurate building boundaries from 3D point clouds LiDAR data and obtained results are evaluated by comparing with footprints in the cadastral map. The second challenge is to deal with step edges among the adjacent flat roof patches even with the small height differences and solve overlapping problem in 3D space.
Objectives
- The aim is to develop a methodology to automatically reconstruct accurate 3D model of building with different height levels from sparse point clouds, such as LiDAR data, taking into account resolution, cost and speed of the process.
- Improving the reliability and geometric accuracy of 3D modeling based on LiDAR as alone source of data without using any complementary data.
- Improving 3D building reconstruction, as buildings are the key features in 3D city models.
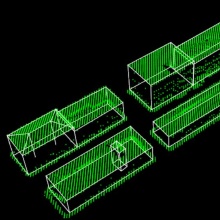
- Testing applicability of the developed methodology for 3D model generation of different types of building using LiDAR data of Munich figure 1.
- Developing the connectivity of workflow stages to overcome some common problems such as gaps in the LiDAR point clouds and the fact that LiDAR does not record the edges properly.
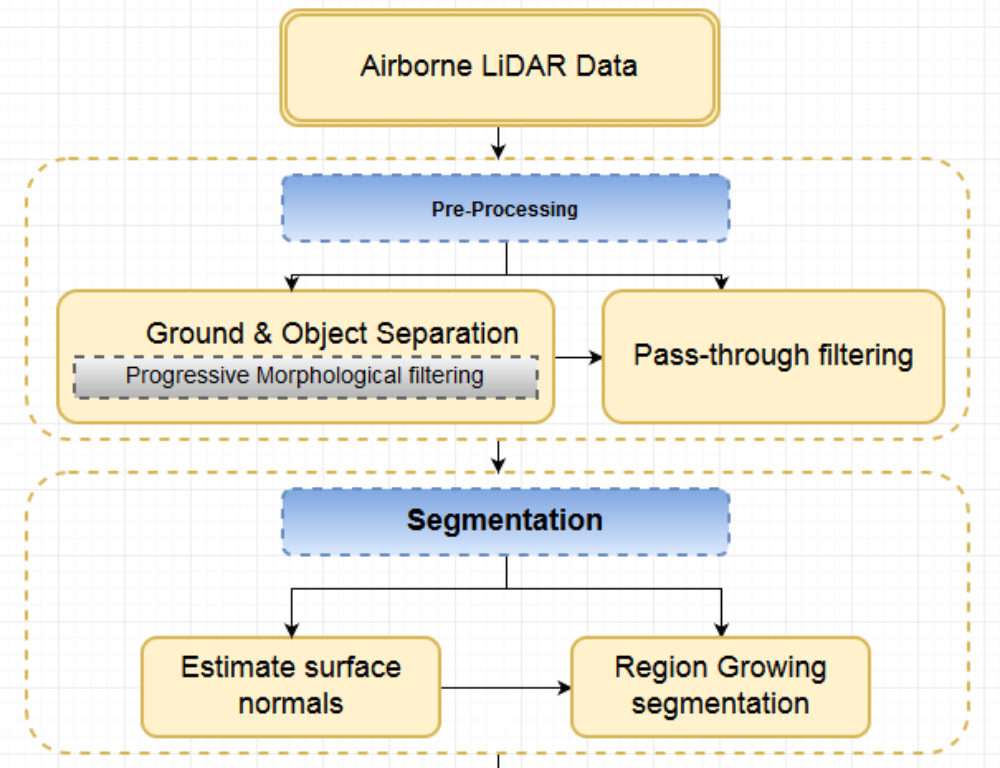
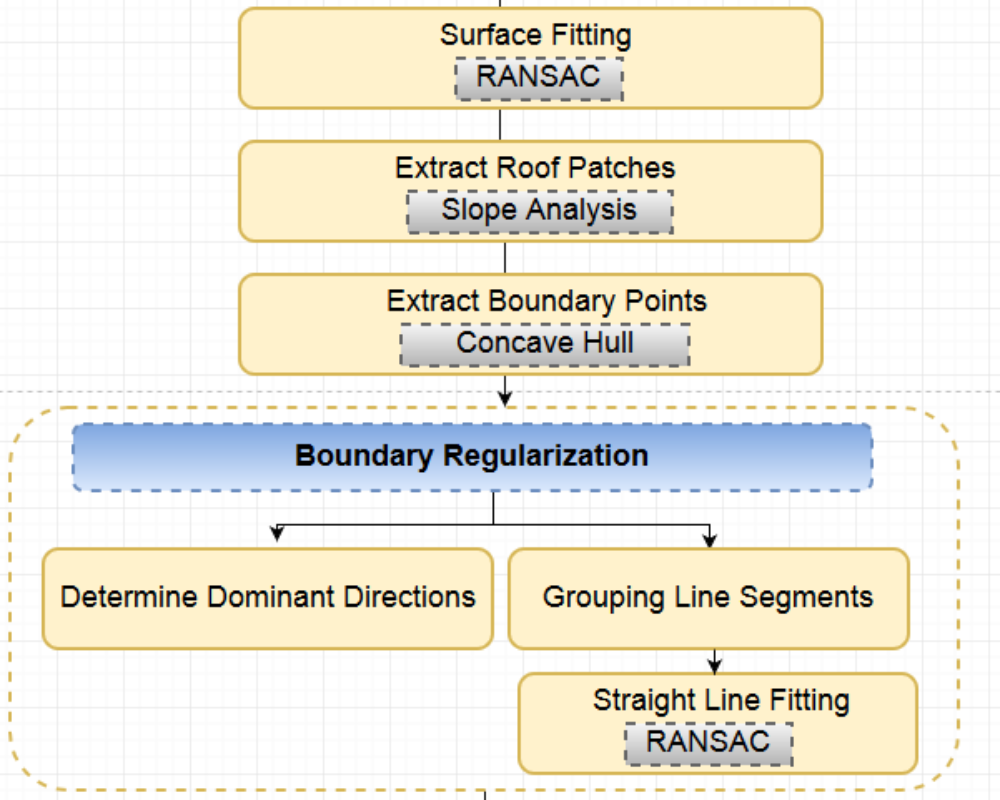
Proposed Methodology
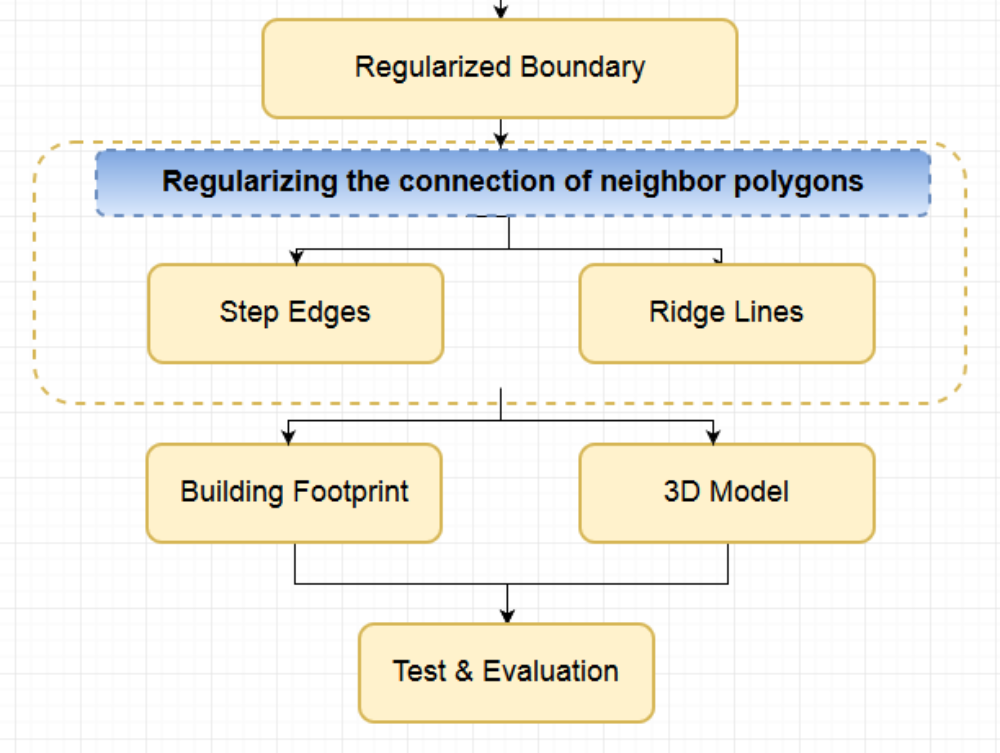
Testing
The following figures show the results of applying the main algorithms in the proposed methodology on part of test data.
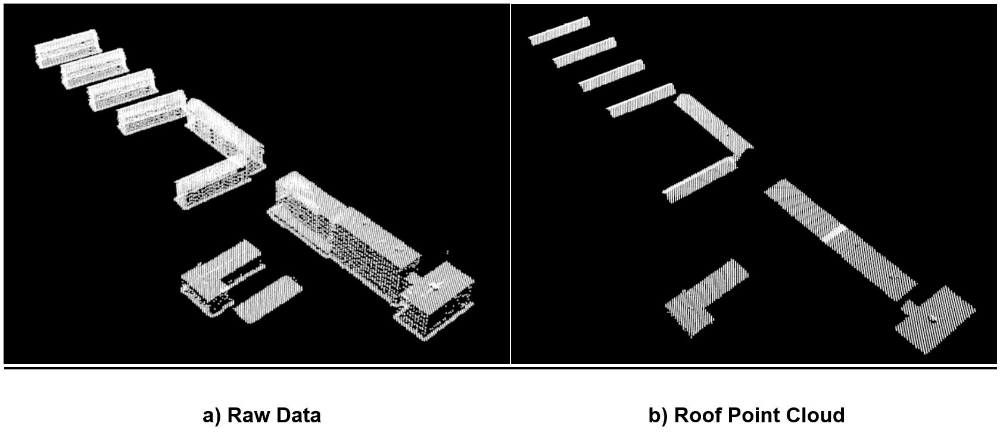
Progressive Morphological Filter:
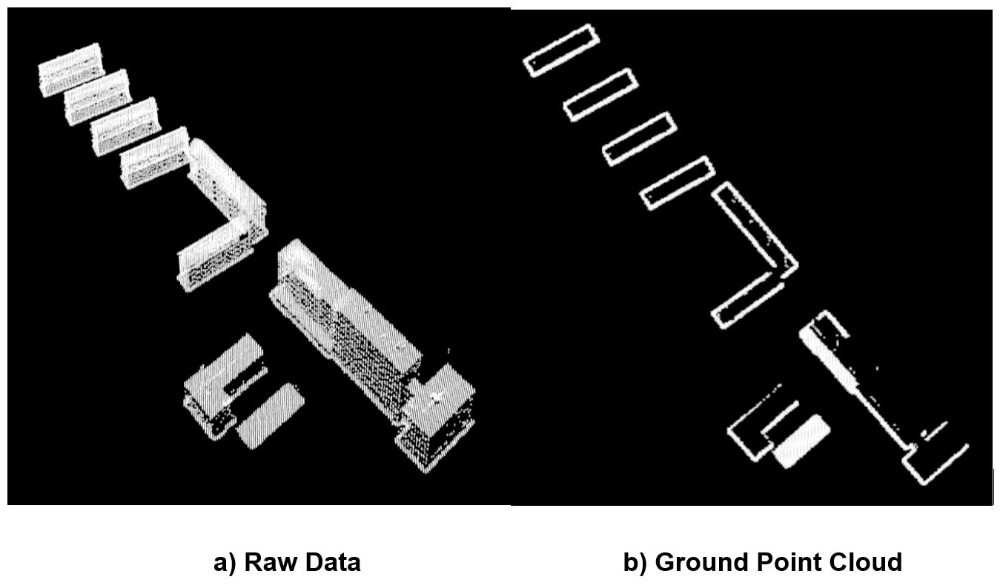
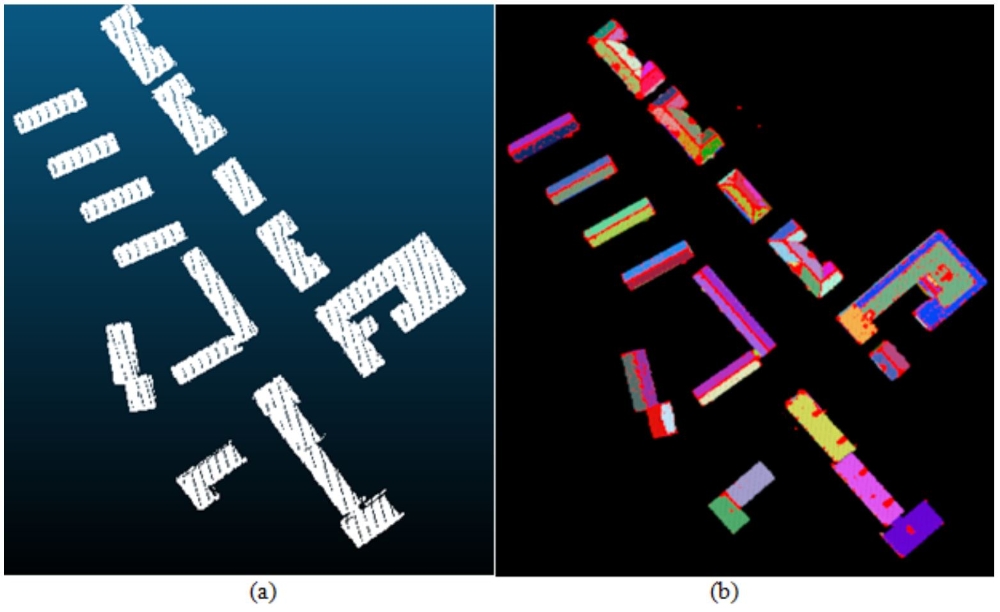
Region growing segmentation:
Slope Angle-based Filtering:
Concave-hull Algorithm:
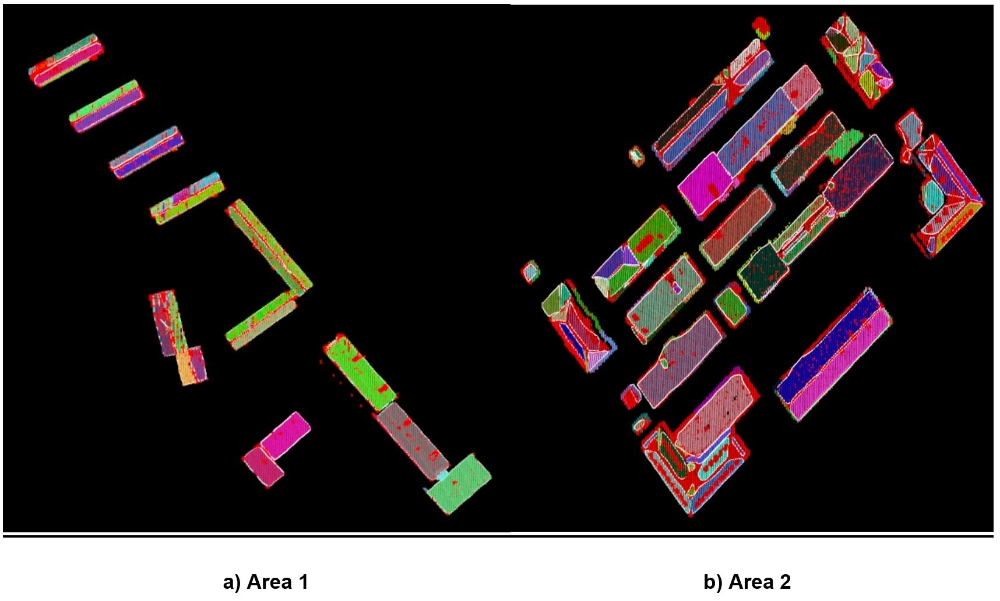
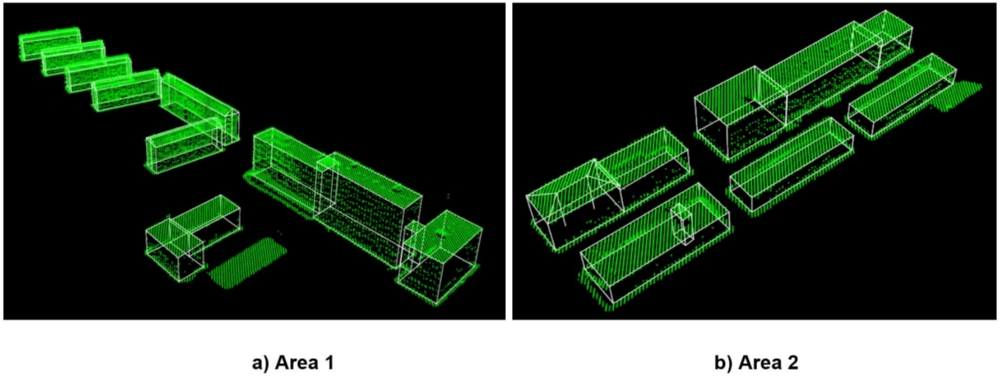
The final results of 3D models and footprints of parts of data are represented in the following figures.
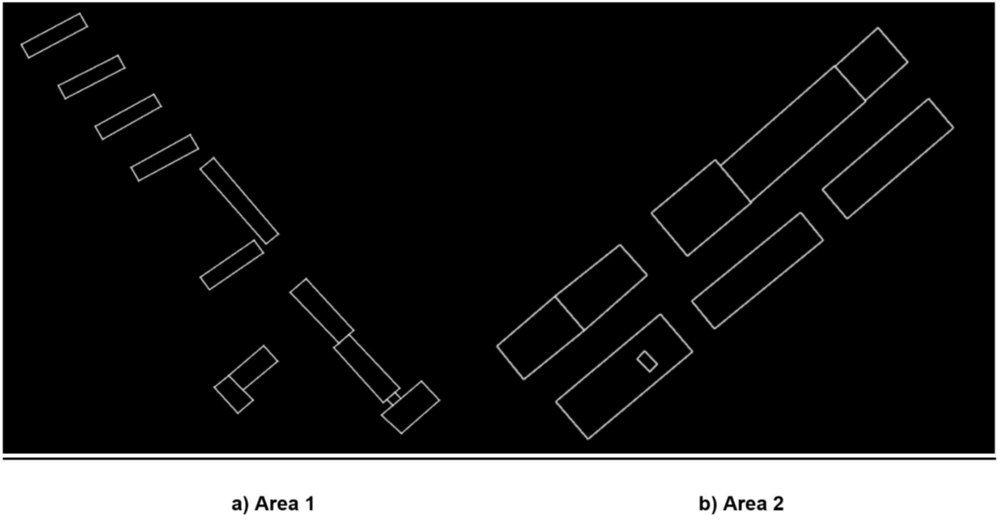
2D-projections of 3D building boundary of the roof are compared with reference 2D building boundary from cadastral map using PoLiS metric method (Avbelj u. a. [2015]) Figure 9.

Conclusions
The aim of this research is to design a methodology that reconstructs buildings with different height levels in urban areas using merely LiDAR data. The procedure is restricted to not require any other source of data rather than LiDAR. This was done intentionally to avoid the limitation of availability of other sources of information in some areas. Where sources such as ground plans, satellite imagery, airborne imagery and multispectral data are not available for every desired site.
So far, the proposed methodology, for the determination of 3D building models from Airborne LiDAR data, is presented. All subsequent steps (filtering, segmentation, extracting roof patches, outlines extraction and regularization and building model generation) are applied automatically. The applicability of all individual processing steps were demonstrated. Since the results of all evaluation techniques are plausible, the tested buildings are properly and completely modeled. The comparison of the extracted boundary polygons and reference data using PoLiS metric has shown, that a low average dissimilarity between the reference polygons and the automatically extracted boundary polygons. The comparison of the extracted models and the original LiDAR point clouds is also shown the reliability of the results.
However, some difficulties were encountered which are discussed as below. Although the segmentation procedure shows successful results, it might fail to segment roof regions in some areas. Areas where the roof segment size is not large enough to contain enough LiDAR points to estimate reliable geometrical parameters of the segment which might lead to inaccurate roof segments. In such cases, increasing the data density might alleviate this obstacle to a certain extent. In roof polygons extraction, the performance of the process was successful especially with Square-shape roof regions as shown experimental results. However, some nodes might be shifted from their true position during the joining and connecting of the roof planar segments especially with complex buildings.
The used approach is data-driven. Hence, the resulting models aim at well approximation of the given LiDAR point clouds. The sequence used techniques have demonstrated the ability to reconstruct buildings with different height levels from airborne LiDAR data as an alone data source. In other words, the proposed methodology works for 3D reconstruction of a set of buildings with different height levels including (rectangular, L)-shape buildings and building with (flat, gable or hipped) roof. Also mixed of flat and hipped roof building is considered. Compared to model driven approaches, a data-driven approach is more flexible since it reconstructs complex buildings regardless of its predefined form. But Anywise, it is known that data-driven approach is suffering of probable risks of obtaining disturbed models for unspecific buildings. While model-driven approach is restricted by predefined library. Data-driven approach generally requires assumptions. In this research one of the assumptions is that the buildings can be reconstructed by a composition of planar faces. Another assumption is that building edges are mostly orthogonal or parallel to the main building direction. Moreover, the point clouds in general comprise certain random and systematic errors. Thus,the used thresholds in the proposed methodology may need to change for another LiDAR data for better efficiency in reconstruction process.
The 3D building generation using data-driven approach is still heavily under construction. Future work of this research, can be performed by improving the methodology to use less thresholding parameters to increase level of automation. And more robust contraints may consider in the regularization process in order to regularize more complex boundary shapes.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter