Maria Szatkowska
Analysis of Distortion Parameters for Physical Interpretation of Intrinsic Camera Alignment
Duration of the Thesis: 6 months
Completion: June, 2016
Supervisor & Examiner: Prof. Dr.-Ing. Norbert Haala
Supervisors: Dr. Uwe Apel, Matthias Küver
Nowadays all cameras used for object recognition and reconstruction should be calibrated in order to determine their intrinsic parameters. The intrinsic orientation parameters such as focal length and principal point are required during photogrammetric reconstruction and in various algorithms for Advanced Driver Assistance Systems. The calibration is an important task, because the small errors measured in the image plane can entail the huge errors in the object system. If the parameters are determined in advance, processing is simplified and accuracy is increased. The cameras mounted in the cars are the low cost digital cameras with low resolution but mechanical very stable (e.g. stable to temperate changes). During their production, defective or inaccurate manufacturing processes may lead to the arising many errors of the camera, particular in the optics. One of them is a tilt between the lenses and the image-sensor and therefore a decentering of the optical system. As the production of the cameras is made in steps, during which the alignment of the individual parts of the camera is done in order to make the production of the cameras more profitable, it is important to identify error contributions during the manufacturing process. Detection and elimination of these problems, it is of great help to be able to determine the physical alignment between lens and image sensor. One solution is to make use of a special calibration model which provides a physical interpretation of the intrinsic orientation of the camera. There are plenty of calibration models available, which can model and minimize the errors of the cameras. There are three main types of the calibration models: physical motivated models such a Brown model, models based on polynomials called mathematical models e.g. Grün model, Chebychev model and combined models, which mix the physical and mathematical models. Unfortunately none of them, gives the possibility to deliver a physical interpretation of the errors caused by the inclination of the lens or the sensor. The purpose of the following master thesis is to find the new calibration model, which enable determination of the lens inclination angle during single shot calibration.
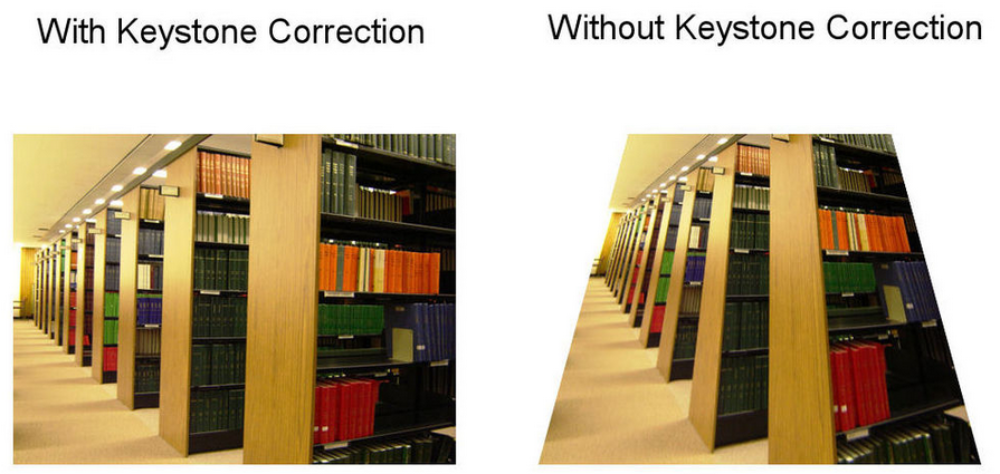
If the lens is tilted aside from the radial and tangential distortion and affine and shear, the keystone distortion should be considered. Effect is of the keystone distortion can be seen in Fig. 1.
If the lens is tilted the geometry inside the camera is changing. In the Fig.2 is shown the geometry of the normal case camera and the camera with the tilted lens.
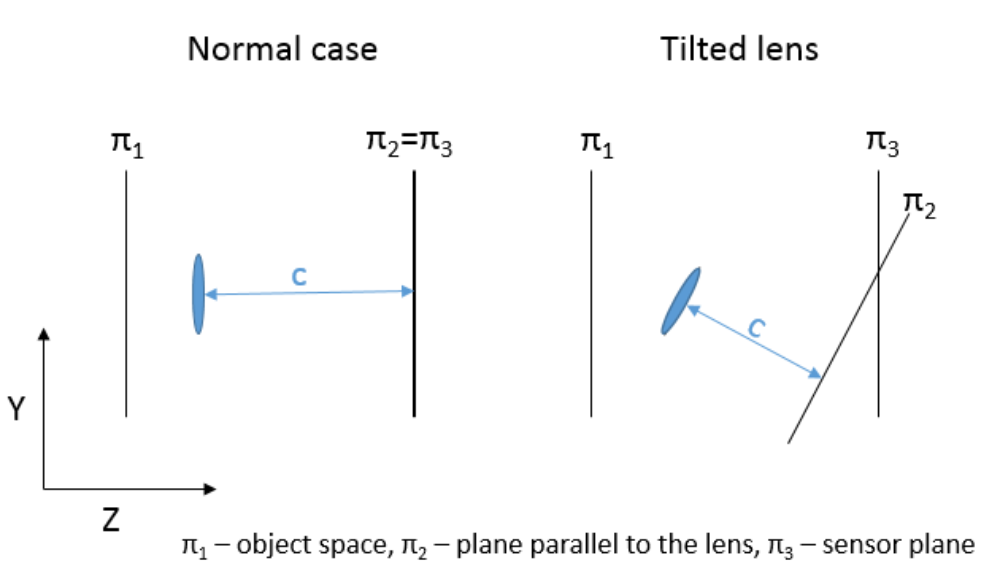
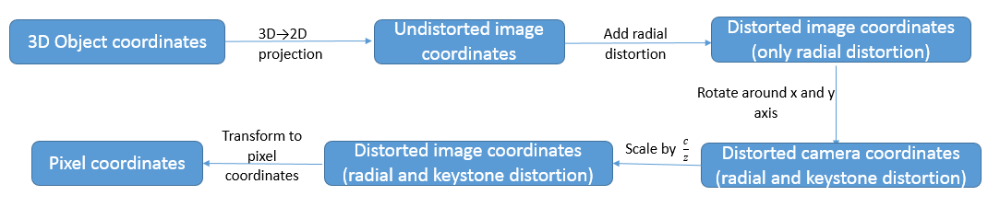
It can be seen that in normal case camera planes π2 and π3 are coplanar. When the lens is tilted, these 2 planes are not any more coplanar. It was notice that the angle of the lens inclination is the same as the angle between π2and π3. In this assumption only relative inclination between lens and sensor can be found. Based on the following presumption, the new calibration model was found. The designed calibration model bases on two collinearity equations and is delivered in the following steps:
During the study it was noticed that based on the same principals, two calibration models can be found. They differ only about the rotation center.
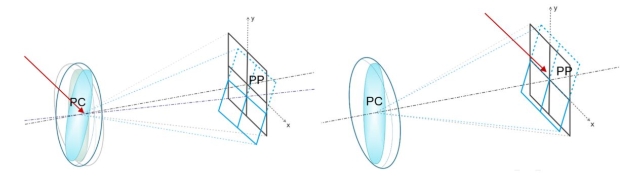
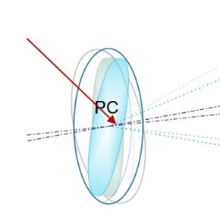
In the first model the rotation center is projective center and the model is called PC model. In the second model the rotation center is the principal point and the model is called PP model. Few methods, which enable to check if model works were established. Some of the methods check the functionality of the model and some of the methods check the accuracy of designed model and their performance with respect to the Brown model and Chebychev model.
It was found that the designed models deliver good directions of the lens inclination, but the magnitude of the angles cannot be checked, because the reference data are not available. The next important fact is that the intrinsic angle are not correlated with the extrinsic angles, what means that the calibration is stable with the change of the camera orientation. The quality of the PP and PC models are comparable with the quality of Brown and Chebychev models. It was also noticed that the designed models compensate the errors of the camera with the high inclination as the camera with the small inclination.
References:
Abraham S., Hau T., 1997: Autonomous High-Precision Calibration of Digital Cameras, Proc. SPIE 3174, Videometrics V, 82
Luhmann T., 2010: Erweitere Verfahren zur geometrischen Kamerakalibriering in der Nachbereichsphotogrammetrie, Verlag der Bayerischen Akademie der Wissenschaften in Kommission beim Verlag C. H. Beck, München
Luhmann T., Robson S., Kyle S., Harley I., 2011: Close range Photogrammetry. Principles, techniques and application, Whittles Publishing
Remondino F., Fraser C., 2006: Digital camera calibration methods: considerations and comparisons, International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 36(5): 266-272. Commission V Symposium, Dresden, Germany.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter