Cihat Bertan BERDANOGLU
Extraction of Vectorial Information and Accuracy Analysis of Railway Mapping
Duration of the Thesis: 6 months
Completion: February 2016
Supervisor & Examiner: Prof. Dr.-Ing. Dieter Fritsch
Co-supervisor: Dr.–Ing. Susanne Becker
Introduction
Mapping the current environment is a main interest of Computer Vision technology and Geodesy. Recently, the interest is growing with emerging technologies because 3 Dimensional Visualization is necessary and getting much more common for other related professions for various purposes. As per this respect, Mobile Mapping System is an efficient method for accurate, quick and huge amount of data collection nowadays. Moreover, this system introduces a new dimension for Transport Agencies such as Stuttgarter Strassenbahnen AG which runs in Stuttgart, Germany. Furthermore, the company wants to have 3D data along all their railway system covering 130 km line in Stuttgart to monitor their structures for safety and provide better service to their passengers. Thus, the company started a pilot project to see the performance of epoch-making Mobile Mapping Technology inside tunnels.
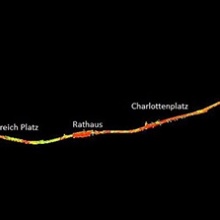
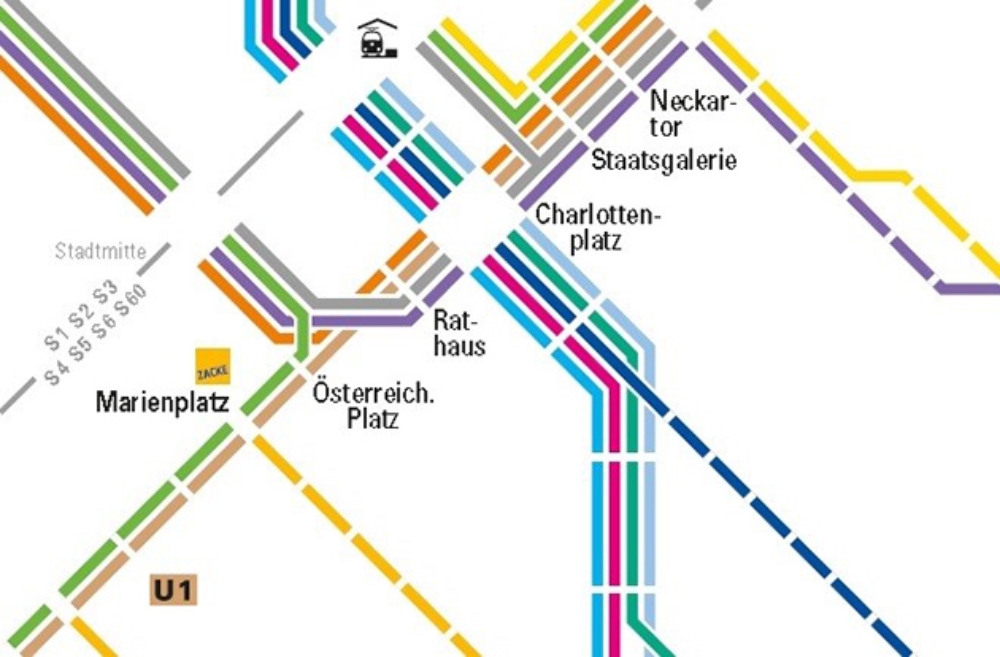
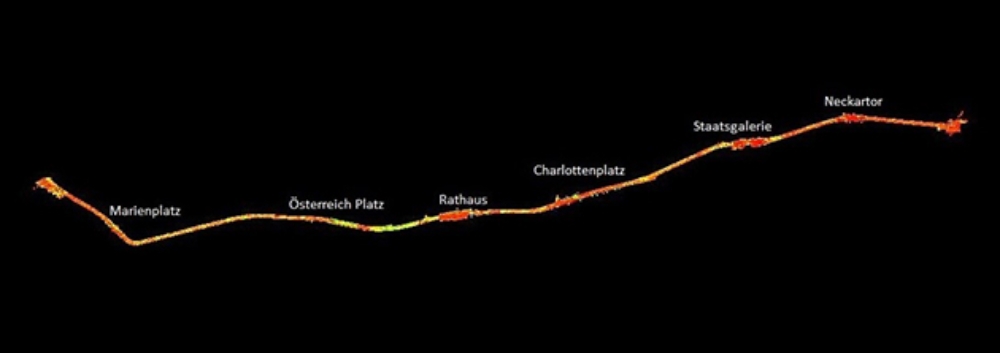
The project covers almost 4km tunnel, located between Marienplatz and Neckartor stations by placing control points inside the tunnel allowing wide accuracy analysis to clarify the performance of system in GNSS data obstructed area.
To understand the performance of the system, 3 main approaches were operated in this thesis. First of all, Best Fitting approach gave us the local noise of the system. Secondly, the company provided the coordinate of ground control points, beside point cloud in different coordinate systems allowing us to transform coordinates into each other to find out the total network noise over the project. Finally, extraction and variances between the data also supplied by company in 2 Dimension and the data extracted from point cloud became another indication for accuracy analysis.
Literature Review
MMS basically comprises 6- varied components, Laser Scanners, IMUs, GNSS Receivers, Distance Measurement Indicators, Digital Cameras, and Rigid Platform along with vehicle apart from preferably included ancillary devices [Pue13].
To examine the accuracy and noise of the point cloud, preliminarily accessible accuracy should be known. To know the range of accuracy limit is to be essential for the determination of objected accuracy. Because of that, accuracy components are the most suitable indications to see the border of accuracy. Each system components contribute at varying scale to overall accuracy. Thus, it is quite meaningful to investigate the impact of each component to system. Accuracy components are mainly as in the following: Laser Scanner Errors, IMU Attitude Errors, Boresight Errors, Lever Arm Offset Errors.
Thesis Work
The foreseen procedures were fulfilled the objectives of the thesis. 3 main evaluations have been pursued to work out the accuracy of pilot project, first the determination of local noisy with best fitting planes have been operated, then 10 parameter transformation between ground control points and corresponding coordinates in point clouds have been realized to find out network noise. Third and last part of the thesis work is the extraction of infrastructural information covering interested area, and comparison of extracted data with existing vectorial data delivered by Stuttgart SSB.
The data used in the thesis delivered by transportation Company is in the following;
- Point Cloud data was comparted to acceptable pieces to transfer, export, and import so on., and it is classified as Left and Right Scanner in .las format, consisting of more than 50 tails ;however, not all these tailed data is forming interested tunnel area, the used tailed data of point cloud was given with their descriptions and file size below:
- Strecke 1 Left and Right, abbreviated as SS1L and SS1R (Neckartor - Marienplatz 50-60 km/h), number of tails: 18-34 and file size: 42.8 GB
- Strecke 2 Left and Right, abbreviated as SS2L and SS2R (Marienplatz - Neckartor 50-60 km/h), number of tails: 19-37 and file size: 50.2 GB
- Strecke 3 Left and Right, abbreviated as SS3L and SS3R (Neckartor - Marienplatz 20 km/h), number of tails: 1-40 and file size: 60.3 GB
- Strecke 4 Left and Right, abbreviated as SS4L and SS4R (Marienplatz - Neckartor 20 km/h), number of tails: 11-46 and file size: 64.6 GB
- Infrastructural data in GK coordinate system as .dwg format, file size: 2 MB
- Terrestrial target coordinates in GK coordinate system as .txt format
- Railway track profile with detailed dimensions as .dwg format
Conclusion
The thesis studied the accuracy analysis of SSB pilot project realized for 4 km light railway line in Stuttgart. The work of this thesis illustrated that local noisy of system is around 2mm, and 3D similarity transformation being another method of analyzing the network noise showed that the performance was changing minimum 4.3 mm to maximum 8mm. As a final assessment, differences between available location information of infrastructure and extracted vectorial lines revealed mean variation is 6 mm whilst maximum is 18 mm.
References
[Pue13] I.Puente, H.Gonzalez-Jorge, B.Riviero & P.Arias (2013). “Review of mobile mapping and surveying technologies.” Spain. 2013.
[SSB14] Stuttgarter Straßenbahnen AG (2014). Available at: http://www.vvs.de/download/Stadtbahn_Liniennetz.pdf
Ansprechpartner

Dieter Fritsch
Prof. Dr.-Ing.Professor im Ruhestand