Christoph Heck
Performance of Precise GNSS/Inertial Trajectory Solutions in UAS Photogrammetry
Dauer der Arbeit: 6 Monate
Abgabe: Juni 2015
Betreuer: Tobias Heuchel (Trimble Germany, Geospatial Division), Dr.-Ing. Michael Cramer
Prüfer: Prof. Dr.-Ing. Norbert Haala
Mittlerweile gibt es durch die technische Entwicklung im Bereich der Drohnen auch in der Photogrammetrie die Möglichkeit, kleine unbemannte Plattformen ausgestattet mit modifizierten, handelsüblichen Kameras für die Aufnahme von Luftbildern zu verwenden. Um eine Auswertung ohne die Verwendung von Passpunkten zu ermöglichen ist die hochgenaue Bestimmung der äußeren Orientierung mit Hilfe von GNSS/Inertial-Messungen notwendig. Für die großen bemannten Systeme ist dies bereits üblich und durch die technische Weiterentwicklung der Sensorik wird dies inzwischen auch im Bereich von Drohnen, auch Unmanned Aerial System (UAS) genannt, verwendet.
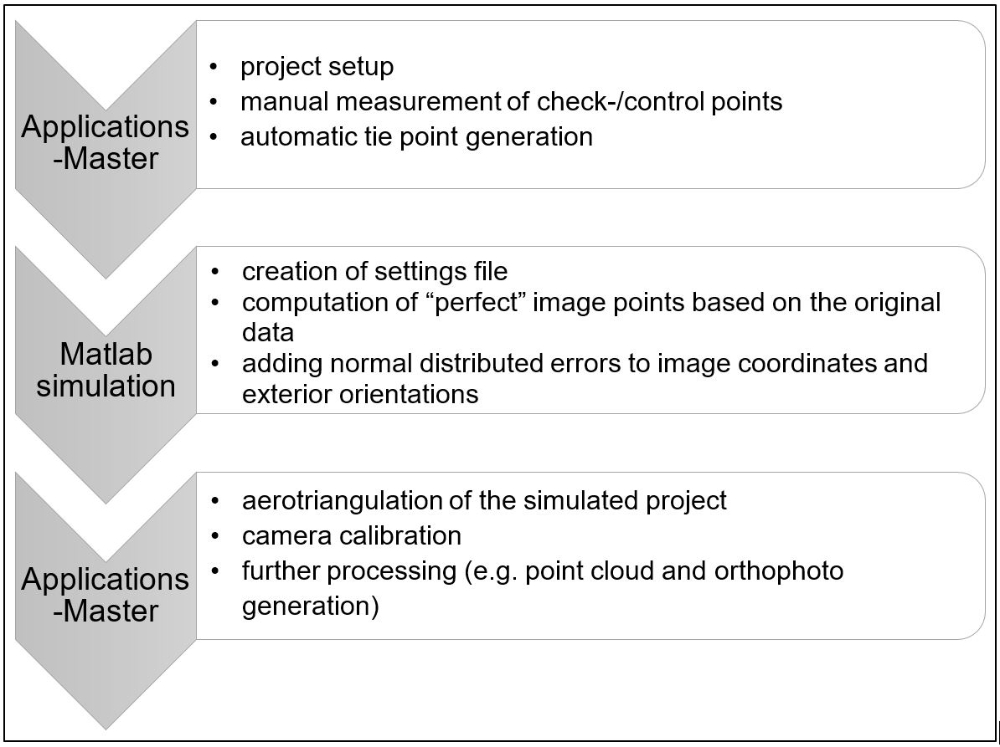
Im Zuge dieser Arbeit wurde ein Simulationsprogramm entwickelt um die Auswirkungen der Positions- und Winkelmessgenauigkeit auf die Genauigkeit der Kamerakalibrierung und der Aerotriangulation zu ermitteln. Die Simulationen basieren auf realen Daten, aufgenommen mit einem UAS, um eine möglichst realistische Anzahl und Verteilung der Verknüpfungspunkte zu erhalten. Die Verknüpfungspunktextraktion, die Kamerakalibrierung sowie die Aerotriangulation erfolgen mit dem Softwarepaket ApplicationsMaster der Firma Trimble. Im Folgenden wird die Funktionsweise des Simulationsprogrammes kurz erläutert. Nach der Verknüpfungspunktextraktion werden mit dem Simulationsprogramm die „perfekten“ Bildkoordinaten der Punkte aus der gegebenen äußeren Orientierung berechnet. Anschließend werden normalverteilte Fehler in der gewünschten Größe auf die Bildkoordinaten, die Position und die Lagewinkel der Projektionszentren addiert. Alle notwendigen Informationen werden aus der Projektdatei (*.prj), der Punktdatei (*.xpf) und einer manuell erstellten Textdatei entnommen. Die Textdatei enthält die notwendigen Parameter für die Simulation. Die Projekt- sowie auch die Punktdatei werden vom ApplicationsMaster erstellt. Die neuen fehlerbehafteten Werte aus der Simulation werden am Ende in eine neue Projekt- und Punktdatei geschrieben. Somit erhält man ein simuliertes Projekt bei dem die Größe der Fehler für die Messungen bekannt ist. Abschließend wird mit dem ApplicationsMaster die Kamerakalibrierung und die Aerotriangulation berechnet. Dabei wird eine sogenannte integrierte Sensororientierung verwendet, bei der die gemessene äußere Orientierung als gewichtete Beobachtung in die Aerotriangulation mit eingeht. In Abbildung 1 ist der grobe Ablauf der Simulation dargestellt.
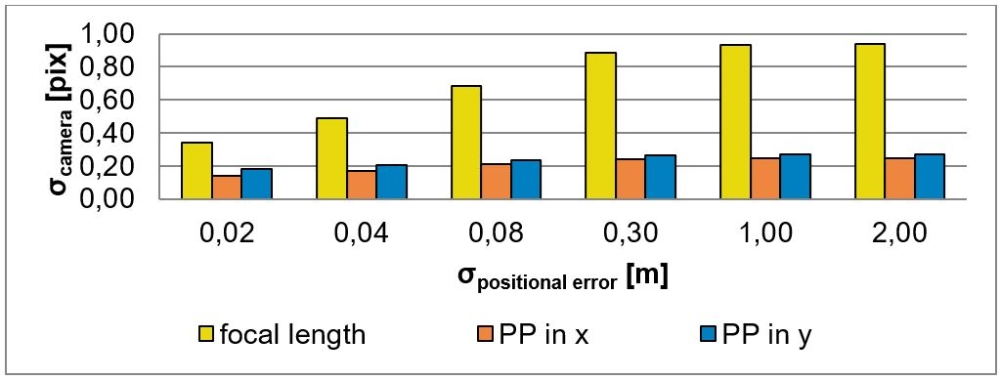
Nachfolgend wird ein beispielhaft eine Grafik der ausgewerteten Ergebnisse dieser Simulationen analysiert. Bei den dargestellten Werten handelt es sich um die Standardabweichung (SD) der ausgewerteten Parameter. Der verwendete Datensatz besteht aus 414 Bildern aufgeteilt auf 20 Flugstreifen. Die Aerotriangulation, sowie auch die Kamerakalibrierungen wurden ohne Passpunkte und nur unter Verwendung der gemessenen Projektionszentrumskoordinaten berechnet. Mit 41000 Punkten aus der Verknüpfungspunktextraktion, sind die Bilder sehr gut miteinander verknüpft. In Abbildung 2 sind die Ergebnisse aus der Kamerakalibrierung dargestellt. Auf der x-Achse ist die SD der simulierten Positionsfehler und auf der y-Achse die SD der bestimmten Kameraparameter zu sehen. Bei den Parametern handelt es sich um die Brennweite und die x- bzw. y-Koordinate des Bildhauptpunktes. Besonders die SD der Brennweite wird mit steigender SD der Position größer. Zwischen 0.3 und 2.0 m verändert sich dann die SD der Brennweite nur noch sehr wenig. Die SD der Bildhauptpunktkoordinaten verändert sich nur sehr wenig und ist immer deutlich niedriger als die der Brennweite. Die Brennweite lässt sich somit bei einer Positionsgenauigkeit von wenigen Zentimetern mit einer Genauigkeit von bis zu 0.34 pix bestimmen.
Außer dem Einfluss der gemessenen Projektionszentrumskoordinaten wurden zusätzlich noch der Einfluss von den Winkelmessungen und der Bildmessungen der Verknüpfungspunkte mit unterschiedlichen Genauigkeiten untersucht. Dabei stellte sich heraus, dass die Winkelmessung nur bei schlechter Positionsgenauigkeit (> 0.3 m) einen nennenswerten Vorteil bringt.
Im Verlauf der Arbeit wurden noch weitere Szenarien und Blockkonfigurationen analysiert um die Effektivität von Bildflügen mit UAS zu steigern. Die Analyse erfolgte mit Hinblick auf die Genauigkeit der kalibrierten Kameraparameter, der bestimmten Projektionszentren und der ausgeglichenen Verknüpfungspunktkoordinaten. Um die Effektivität zu steigern, wurde die Überlappung zwischen den Flugstreifen, sowie zwischen aufeinanderfolgender Bilder verringert. Verschiedene Szenarien mit Überlappungen von 40% bis 80% wurden hierfür ausgewertet. Außerdem wurde ein sogenanntes Korridorszenario bestehend aus nur zwei Flugstreifen analysiert.
Die simulierten Szenarien konnten unter der Annahme einer zentimetergenauen Positionsbestimmung und ohne die Verwendung von Passpunkten größtenteils Ergebnisse liefern die vergleichbar mit denen der klassischen Variante (Positionsbestimmung mit Passpunkten) sind.
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme