
Hsin-Feng Ho
Hochauflösende Drohnenphotogrammetrie – Ein Vergleich am Beispiel der Schleuse Hessigheim
Motivation
Klassischerweise werden Deformationsmessungen an oder im Umfeld von Bauwerken mit terrestrischen Verfahren durchgeführt. Für Veränderungen in einem größeren Gebiet könnten aber auch Bildbasierte Verfahren mittels Drohnen hilfreich sein. Dieses soll im Rahmen einer Messkampagne mit kommerziellen Drohnenplattform im Bereich der Schleuse Hessigheim untersucht werden. Im Bereich dieser Schleuse und ihrer Umgebung wurden aufgrund der Geologie Geländeabsenkungen vor Ort nachgewiesen. Eine jährliche signifikante Deformation von 1-10mm ist zu erwarten. (Kauther and Schulze (2015)). Die klassische Überwachung der Deformation wird zwei Mal pro Jahr von den zuständigen Behörden durchgeführt. Sie wird in der Regel durch großflächige Tachymetermessungen und hochpräzise Nivellementmessung gemessen. Obwohl solche punktweise terrestrische Messungen hohe Genauigkeit und Zuverlässigkeit liefern, ist die Messung und Auswertung aufwändig und teuer. Wenn die Deformationen in Bereichen vorkommen, die durch das normale Deformationsmonitoring nicht erfasst werden, entsteht außer finanziellen Gründen das Risiko, dass sie mit punktweisem Aufnahmeverfahren nicht detektiert werden können. Im Rahmen eines großen Forschungsprojekts gefördert von der Bundesanstalt für Gewässerkunde (BFG) wurde untersucht, ob das UAV-basierten Monitoring als eine Alternative um die Deformation in Hessigheim zu erfassen dienen kann (Haala et al. (2022)).
Zielsetzung
Im Rahmen des Projekts im Hessigheim werden Phase One iXM 100 und DJI Zenmuse P1 Kamera eingesetzt. Der Schwerpunkt dieser Bachelorarbeit liegt in der Untersuchung der Qualität der kommerziellen Kamerasysteme als Alternative zu klassischen terrestrischen Einmessung und Laserdaten. Gleichzeitig sollen die von den verschiedenen Kamerasystemen erzeugten Punktwolken miteinander verglichen werden.
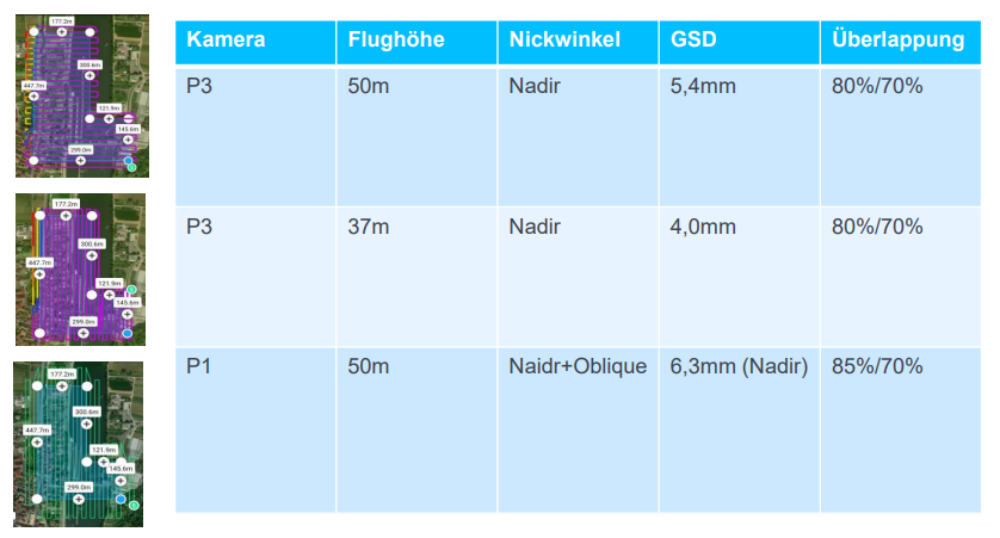
Das von der BfG geförderte Forschungsprojekt wurde mit einer high-end Drohne und Sensor durchgeführt, die so im Markt noch nicht als kommerzielle Dienstleistung verfügbar ist. Diese Arbeit vergleicht die mit dieser high-end Sensorik und Auswertung erzielten Genauigkeiten, mit Ergebnissen aus aktuell standardmäßig verfügbarer kommerzieller Hard- und Software (siehe Abbildung 1).

Datenerfassung
Das Testfeld wurde mit 3 Flügen mit der DJI Matrice 300 RTK Drohne erfasst. Die beiden Flüge mit der P3 Kamera haben zwei unterschiedlichen Flughöhen von 37 und 50m. Sowohl Nadirbilder als auch Obliquebilder wurden von P1 Kamera aus 50m Höhe aufgenommen (siehe Abbildung 2).
Auswertung
Aufgenommen wurden 613 Bilder und 3 vollständige Scans der Höhle. Davon können im weiteren Verlauf der Auswertung 437/613 Bildern und der erste Scan aus dem Laserscanner ausgewertet werden.
Auswertung in Agisoft Metashape
Die Auswertung der aufgenommenen Bilder erfolgt mit Agisoft Metashape. Betrachtet werden dabei die Residuen an den Kontrollpunkten und zwischen verschiedenen Datensätzen. Dabei werden der Einfluss der GNSS-Positionbestimmung, Obliquebilder und Anzahl der Passpuntke untersucht.
Vergleich der Oberflächenmodelle
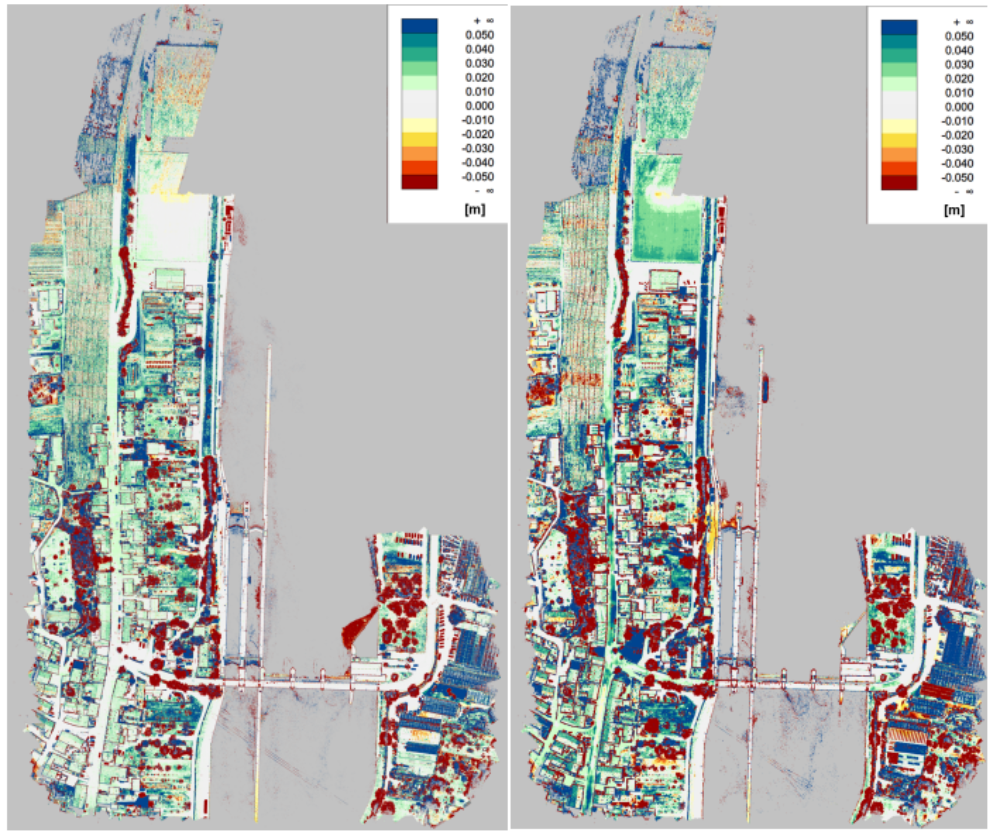
Das digitale Oberflächenmodell ermöglicht die flächendeckende Kontrolle der Höhengenauigkeit durch Vergleich mit einem Referenzhöhenmodell.
Ergebnisse
Die Residuen an den Kontrollpunkten zeigen, dass mit rein passpunktbasierter (10 Passpunkte Konstellation) Bündelblockausgleichung sub-cm Genauigkeit erreicht werden kann. Bei der PhaseOne iXM 100 Mpix (P3) Kamera liegen die Genauigkeit (RMS) aus Kontrollpunktdifferenzen bei 3 mm RMS für alle X,Y,Z Koordinaten. Die DJI Zenmuse P1 Kamera kann die Genauigkeit von knapp 3 mm RMS in der Lage und 8 mm RMS in der Höhe für Nadirbilder erreichen. Bei Kombination von Nadir- und Schrägbilder ist die Genauigkeit von P3 vergleichbar. Aus den Differenzbildungen der DOMs sind die Höhenänderungen im wenigen cm-Bereich festzustellen, wobei vor allem die befestigten Oberflächen im Schleusenbereich sehr gut reproduziert werden können.
Literatur
Haala, N., Kölle, M., Cramer, M., Laupheimer, D. and Zimmermann, F. (2022), ‘Hybrid georeferencing of images and lidar data for uav-based point cloud collection at millimetre accuracy’, ISPRS Open Journal of Photogrammetry and Remote Sensing 4, 100014. URL: https://doi.org/10.1016/j.ophoto.2022.100014
Kauther, R. and Schulze, R. (2015), Detection of subsidence affecting civil engineering structures by using satellite insar, in ‘FMGM 2015: Proceedings of the Ninth Symposium on Field Measurements in Geomechanics’, Australian Centre for Geomechanics, pp. 207–218. URL: https://doi.org/10.36487/ACG_rep/1508_11_Kauther
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme