
Sylvia Ackermann
Simulation und Auswertung eines photogrammetrischen Bildverbandes aus Krankamerabildern
Dauer der Arbeit: 4 Monate
Fertigstellung: September 2021
Betreuer: M.Sc. Lena Joachim
Prüfer: apl. Prof. Dr.-Ing. Norbert Haala
Motivation
Durch Bevölkerungswachstum, Ressourcenknappheit, Urbanisierung und Klimawandel ergeben sich in Zukunft zahlreiche zu bewältigende Herausforderungen für das Baugewerbe. Problematisch ist allerdings, dass die Baubranche gegenüber anderen Wirtschaftsbereichen große Rückstände in der Produktivität aufzuweisen hat.
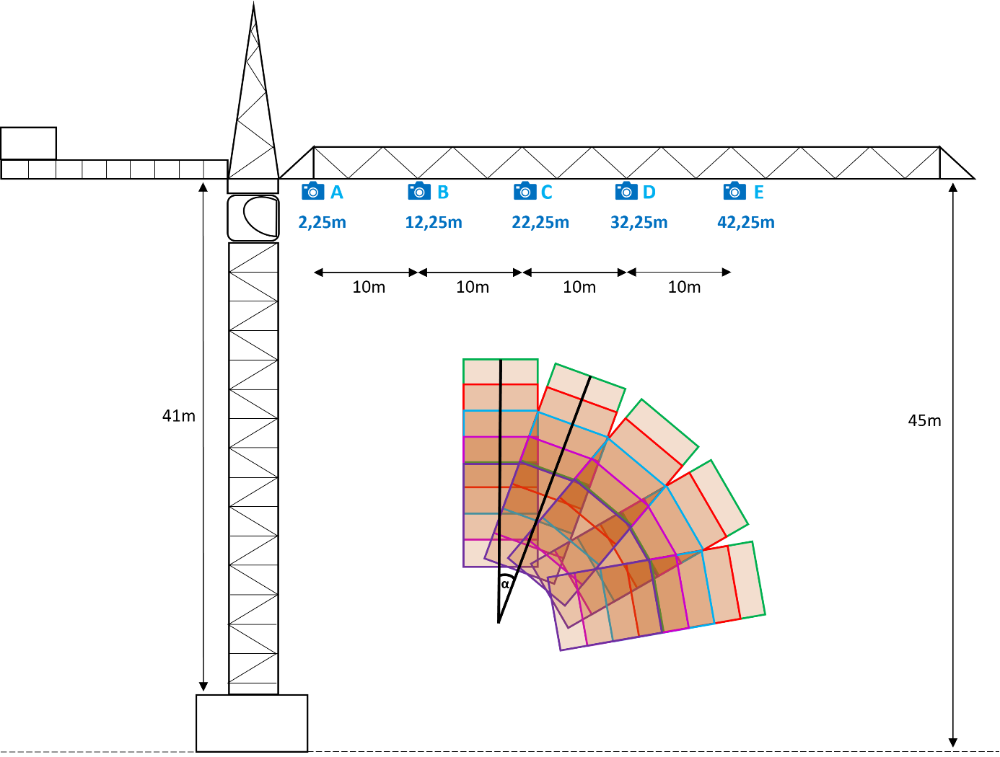
Um Bauprozesse in Zukunft beschleunigen zu können, sollen autonome Transportprozesse eines Turmdrehkrans realisiert werden. Die autonome Steuerung eines Turmdrehkranes kann zu einer Effizienzsteigerung führen, insbesondere wenn dieser mit weiteren Maschinen interaktiv zusammenarbeitet. Zur Realisierung eines solchen autonomen Turmdrehkranes wird die automatisierte Planung eines Pfades durch die Baustellen-Umgebung benötigt. Als Grundlage dieser Pfadplanung soll ein aktuelles digitales Oberflächenmodell (DOM) der Baustelle verwendet werden. Dieses wird mit Hilfe von am Ausleger des Krans montierten Kameras photogrammetrisch generiert. Dafür werden fünf Kameras am Ausleger eines Turmdrehkrans montiert (siehe Abbildung 1). In dieser Arbeit wird die Zuverlässigkeit der photogrammetrischen Rekonstruktion hinsichtlich deren Eignung für die automatisierte Pfadplanung untersucht. Dabei werden insbesondere die Faktoren Genauigkeit und Vollständigkeit betrachtet.
Methodik
Zuerst erfolgt die Planung der Aufnahme des Bildverbandes anhand einer Simulation.
Anschließend wird die Aufnahme des realen Bildverbandes und dessen photogrammetrische Auswertung im Hinblick auf Genauigkeit und Vollständigkeit durchgeführt.
Matlab-Simulation mit Schnittstelle zu inpho UASMaster
Im ersten Schritt wird eine Matlab-Simulation des Bildverbandes mit Schnittstelle zur photogrammetrischen Software UASMaster implementiert.
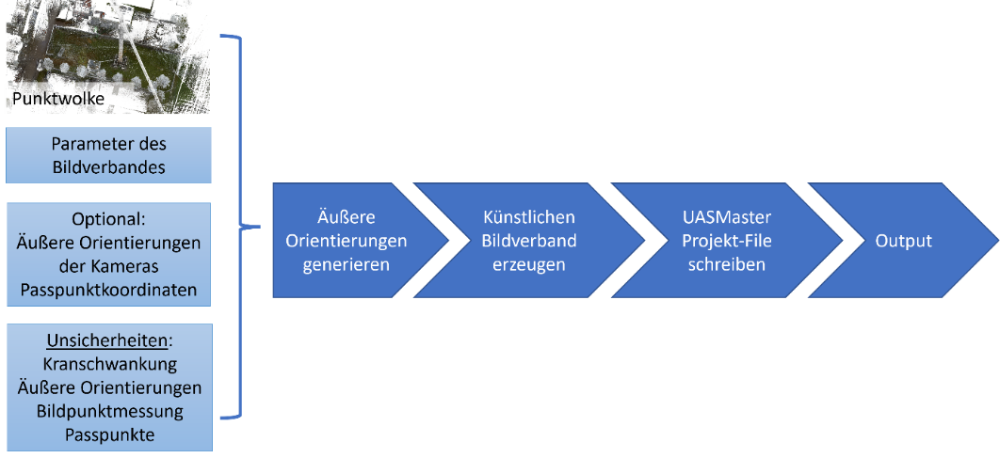
Der Ablauf der Simulation erfolgt nach dem in Abbildung 2 gezeigten Schema.
Mit dem Ausgabefile der Simulation kann im Anschluss eine Bündelblockausgleichung in UASMaster berechnet werden, die Ergebnisse zu den Objektpunktgenauigkeiten liefert. Anhand der Simulation werden die Objektpunktgenauigkeiten für verschiedene Passpunktverteilungen und inkrementelle Rotationswinkel des Krans untersucht. Basierend auf diesen theoretischen Voruntersuchungen werden die Bedingungen für die reale Bildaufnahme mit den Krankameras festgelegt.
Darüber hinaus wird die Simulation im Anschluss an die Auswertung des realen Bildverbandes mit optimierten Eingabeparametern durchgeführt. So kann auch die Objektpunktgenauigkeit außerhalb des Baustellenbereichs betrachtet werden, wo sich keine Kontrollpunkte befinden.
Auswertung des realen Bildverbandes
Im zweiten Schritt wird der reale Bildverband analysiert, wobei die Auswertung mit verschiedenen photogrammetrischen Softwarepaketen erfolgt. Betrachtet werden dabei die Genauigkeit und Vollständigkeit der photogrammetrischen Rekonstruktion. Die Objektpunktgenauigkeit wird anhand der Residuen an den Kontrollpunkten bewertet. Dabei werden der Einfluss der Kamerakalibrierung, der Passpunktkonfiguration und des inkrementellen Rotationswinkels betrachtet. Um die Vollständigkeit zu beurteilen, werden Laserscanning-Daten als Referenz verwendet. Sowohl aus der Laserscanning- als auch aus der photogrammetrischen Punktwolke wird ein DOM generiert, deren Differenz schließlich in einem weiteren Oberflächenmodell betrachtet werden kann.
Ergebnisse
Untersuchungen der Residuen an den Kontrollpunkten zeigen, dass im Baustellenbereich Objektpunktgenauigkeiten von 1 – 5 cm erreicht werden können. Dafür wird eine Konfiguration aus 12 Passpunkten und 14 Kontrollpunkten verwendet. Diese Genauigkeit wird unter Durchführung einer Simultankalibrierung der ‚leitenden Parameter‘ (Kamerakonstante, Bildhauptpunkt) erreicht; die übrigen Parameter der Kameraverzeichnung werden aus einer Testfeldkalibrierung bestimmt. Dabei sind für hohe Objektpunktgenauigkeiten in Krannähe große inkrementelle Rotationswinkel ausreichend. Wenn auch Objekte am Baustellenrand von Interesse sind, sollte der Rotationswinkel verringert werden, um diese mit hoher Genauigkeit lokalisieren zu können.
Außerhalb des Baustellenbereichs ergeben die Untersuchungen anhand der Simulation eine Abnahme der Objektpunktgenauigkeit der photogrammetrischen Rekonstruktion mit Vergrößerung des inkrementellen Rotationswinkels.
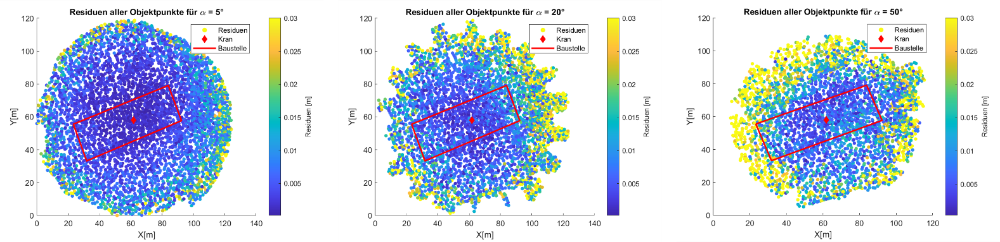
Untersuchungen der Vollständigkeit der photogrammetrischen Rekonstruktion zeigen eine Abnahme der Vollständigkeit mit Vergrößerung des inkrementellen Rotationswinkels α.
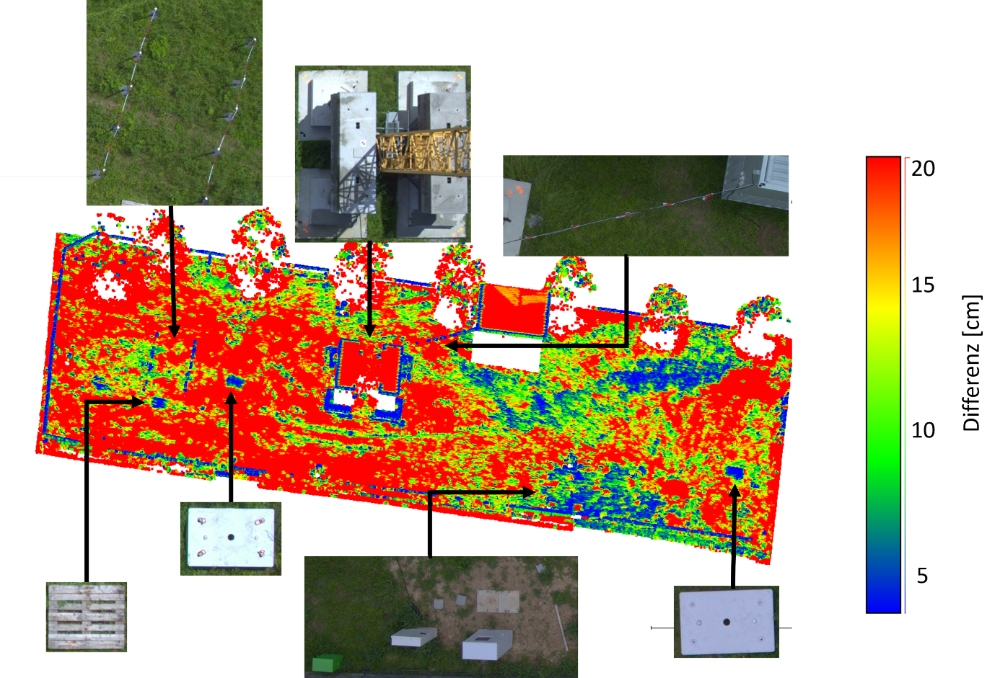
Unabhängig vom Rotationswinkel zeigt sich in Abbildung 4 die schwierige photogrammetrische Rekonstruierbarkeit von Vegetation, wie Bäumen oder der Grasfläche, die das gesamte Baustellengebiet durchzieht. Die sich darauf befindenden Objekte wie Krangewichte, Holzpaletten oder Stangenketten können allerdings mit einer sehr hohen Genauigkeit von 5 cm und besser rekonstruiert werden. Es zeigt sich, dass Objekte mit einer Mindestbreite von 3 cm in der photogrammetrischen Rekonstruktion enthalten sind, wenn diese sich ausreichend vom Hintergrund abheben können. Dies entspricht der Dicke des Bauzauns, an dem dieses Verhalten erkennbar wird.
Fazit
Die Betrachtungen der Residuen an den Kontrollpunkten zeigen, dass im Baustellenbereich Objektpunktgenauigkeiten von 1 - 5 cm erreicht werden. Diese Genauigkeiten sind erreichbar, wenn die Parameter der Kameraverzeichnung mit einer Simultankalibrierung der ‚leitenden Parameter‘ bestimmt werden. Der Vergleich mit den Laserscanning-Referenzdaten zeigt, dass Objekte mit einer Mindestbreite von 3 cm in der photogrammetrischen Rekonstruktion enthalten sind, wenn diese sich ausreichend vom Hintergrund abheben können. Untersuchungen verschiedener inkrementeller Rotationswinkel des Krans zeigen, dass für eine hohe Objektpunktgenauigkeit in Krannähe große Rotationswinkel und am Rand des Aufnahmegebiets kleine Rotationswinkel zu wählen sind. Für eine vollständige Rekonstruktion der Objekte sind allerdings kleine Rotationswinkel von Vorteil.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter