Roman Geiger
Baumdetektion in luftgestützten Fernerkundungsdaten mittels Deep Learning
Dauer der Arbeit: 6 Monate
Fertigstellung: September 2021
Betreuer: M.Sc. Stefan Schmohl
Prüfer: Prof. Dr.-Ing. Norbert Haala
Einführung
Der Umweltzustand von urbanen Räumen wird in Zeiten von steigender Population, hoher Luftverschmutzungen und Klimaerwärmung immer bedeutsamer. Er ist Ausdruck der gesellschaftlichen Lebensbedingungen und Lebensqualitäten. Baumbestände wirken sich positiv auf die Luftverunreinigung, -temperatur und -feuchtigkeit aus. Für das Baummanagement ist eine Katalogisierung der städtischen Bäume ein praktisches Hilfsmittel. Die manuelle Erfassung ist jedoch sehr zeitaufwändig und kostenintensiv. Zum Zweck des sogenannten Monitorings von Bäumen wird deshalb auf verschiedene computerbasierte Methoden und Algorithmen gesetzt. Im Gegensatz zu einer manuellen Baumerfassung, soll in dieser Arbeit eine Baumdetektion mittels Deep Learning getestet werden. Diese neue Art der Baumerkennung kann eine deutlich schnellere und kostengünstigere Alternative zur Katalogisierung und Überwachung des Baumbestandes bieten und so auch Aufschluss über die Stadtvegetation geben. Durch solche Informationen kann der Bedarf von Bäumen in einer Stadt berechnet werden und die Bepflanzung neuer Bäume, anhand günstiger Platzwahl, geplant werden. Dem vorherrschenden Mangel von Bäumen in städtischen Gebieten kann so entgegengewirkt werden.
Methodik
Im Rahmen dieser Bachelorarbeit wird ein moderner, auf Deep Learning basierender Objektdetektor anhand ALS-Daten getestet. Eine ALS Punktwolke, die mit Hilfe von RGB Luftbildern eingefärbt wurde, stellt hierfür die Datengrundlage dar. Dieser, in MATLAB integrierte Objektdetektor soll Bäume in einem städtischen Gebiet detektieren. Als Untersuchungsareal dient das Stadtzentrum um den Hauptbahnhof in Stuttgart.
Im Zentrum der Pipeline steht ein Yolov2 Netzwerk, dem kachelweiße Ausschnitte des Trainingsgebiets zugeführt wurden. Als Referenzdaten dienten dabei manuell erstellt Baumumrisse. Bei Detektion im Testgebiet mussten die Bäume der einzelnen Kacheln durch eine NMS wieder in gemeinsames Koordinatensystem gebracht werden. Es wurden verschiedene Inputvarianten wurden untersucht. Sowohl RGB, nDSM und andere LiDAR-Merkmale, als auch Kombinationen davon.
Ergebnisse
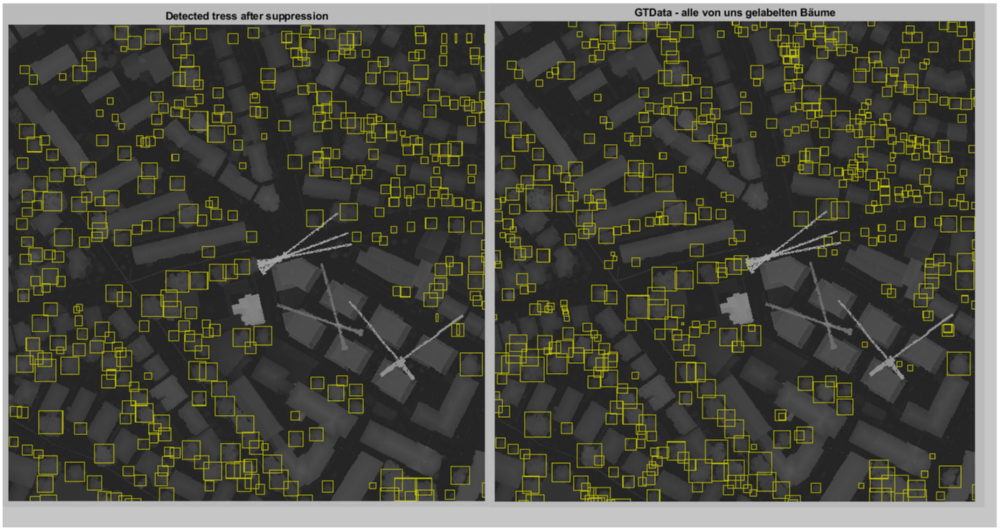
Die besten Genauigkeiten ließen sich erzielen, wenn das nDSM als Input genommen wurde, mit einer Average Precision von 0,47. In Abbildung 1 sind die Ergebnisse des am besten trainiertesten Detektors im Vergleich zu den Referenzdaten zu sehen.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter