Yongxiang Zhang
Crowd-basierte Erfassung von Fahrzeugen aus 3D-Punktwolken
Dauer der Arbeit: 4 Monate
Abschluss: Februar 2020
Betreuer: M.Sc. Michael Kölle, Dr.-Ing. Volker Walter
Prüfer: Prof. Dr.-Ing. Uwe Sörgel
Motivation
Heutzutage besteht ein stets wachsendes Interesse an automatischen Verfahren zur Klassifikation und Interpretation von Geodaten. Zu solchen Verfahren zählt vor allem das maschinelle Lernen wie etwa Convolutional Neural Networks (CNN). Die Entwicklung solcher Systeme bedarf enormen Mengen an annotierten Daten, die als Trainingsdaten dienen. Eine Möglichkeit für die Bereitstellung solcher Daten ist Crowdsourcing. Unter Crowdsourcing versteht man, solche Aufgaben an eine undefinierte Menge an Arbeitskräften, die in der Regel nicht speziell für die Aufgaben geschult sind, auszulagern. Dies hat zum Vorteil, dass der Zeit- und Kostenaufwand im Vergleich zu der Bereitstellung durch Experten stark reduziert werden kann. Bisher wurden bereits zahlreiche Versuche von Crowdsourcing mit Fokus auf 2D Daten wie etwa Bilder durchgeführt. Im Rahmen dieser Arbeit wird ein Web-Tool für die crowd-basierte Fahrzeugerfassung aus 3D LiDAR-Daten implementiert und Qualität der Ergebnisse untersucht.
Methodik
Web-Tool
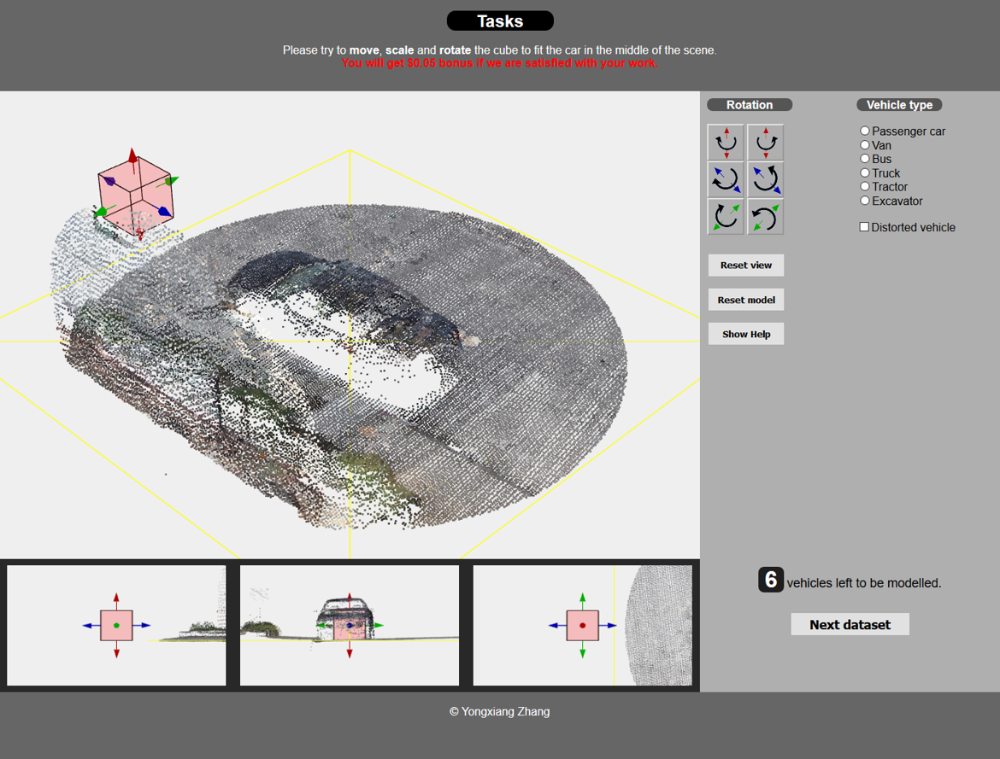
Das für diese Arbeit entwickelte Web-Tool ist ein umfassendes Web-Programm, das sowohl die 3D Erfassung ermöglicht, als auch Mechanismus für Filehandling und Qualitätssicherung enthaltet. Die Hauptfunktionsseite ist in Abb. 1 zu sehen. Pro Datensatz ist ein Fahrzeug mit dem minimal umschließenden Quader zu erfassen. Auf dem Web-Tool kann der Quader verschoben, skaliert und rotiert werden. Insgesamt wurden 116 Fahrzeuge jeweils zehnmal von der Crowd erfasst. Das Web-Tool erreichte die Crowd über der Plattform MicroWorkers, auf welcher die Crowdworker die Erfassung durchgeführt und die Bezahlung bekommen haben
Datenintegration
Die Mehrfacherfassung jedes Datensatzes wurde unter Nutzung des Ausreißer detektierenden Verfahrens DBSCAN (Ester et al. 1996) integriert. DBSCAN wurde ursprünglich als ein Clustering Algorithmus entwickelt, kann jedoch auch für Erkennung der Ausreißer eingesetzt werden. Nach Eliminierung der Ausreißer werden die restlichen Ergebnisse gemittelt und ergeben die Endergebnisse.
Qualitätsanalyse
Zur Beurteilung der Qualität der Crowd-Erfassung dienen die vom Autor bereitgestellten Ergebnisse als Ground Truth. Es werden drei Qualitätsmerkmale der Ergebnisse definiert: (1) Positionierungsabweichung des Quadermittelpunktes (2) Volumenverhältnis zu Referenzen (3) Intersection over Union.
Ergebnisse und Fazit
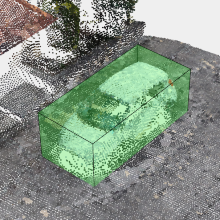
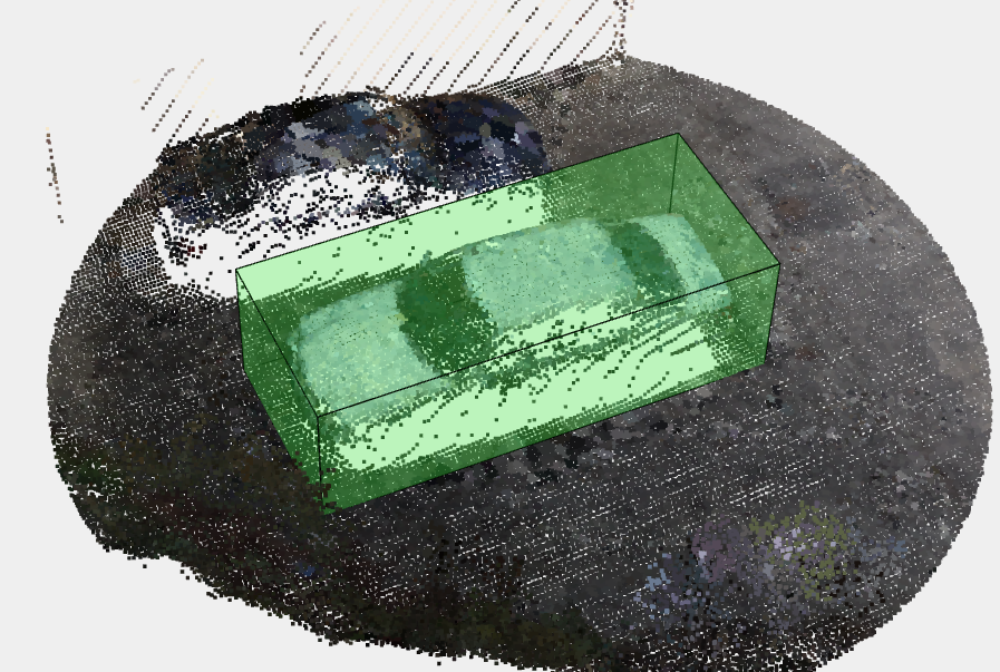
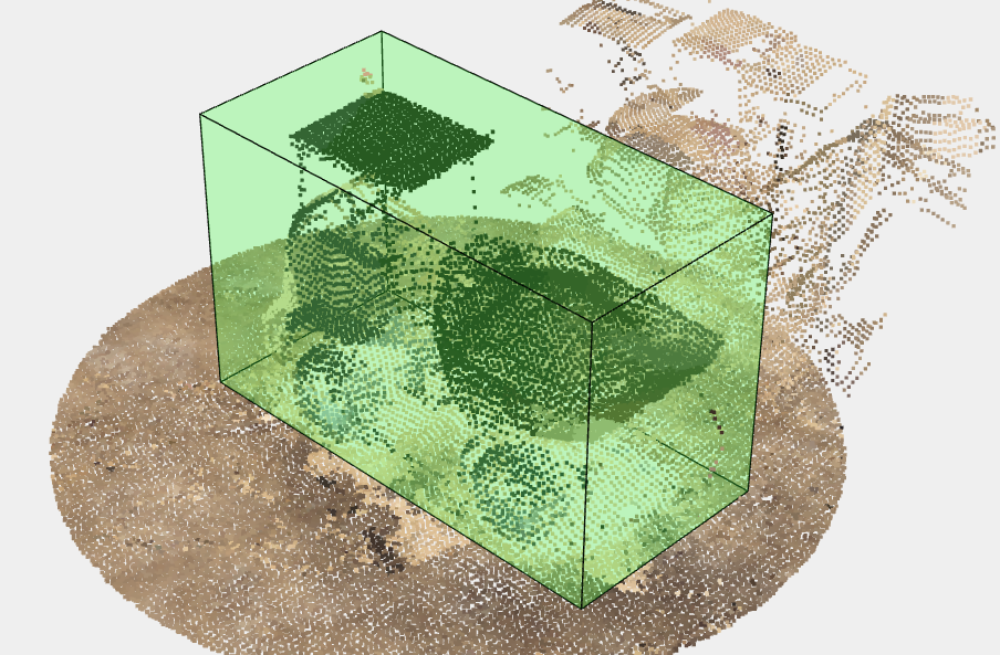
Die Ausreißerquote der Roherfassungen beträgt 18,45%, d.h. mehr als 80% der Crowd-Erfassungen können zu den Endergebnissen beitragen. Zwei Beispiele der integrierten Ergebnisse werden in Abb. 2 gezeigt. Abb. 3 ist eine Darstellung die Ergebnisse mehrerer Fahrzeuge in der originalen Punktwolke.

Bei der Qualitätsanalyse weisen die integrierten Ergebnisse deutlich höhere Qualität als die Roherfassungen auf. Dies lässt sich erklären durch die Idee Wisdom of the Crowd, welche eine der Grundideen von Crowdsourcing ist. Dies heißt, dass die Mehrheitsentscheidung der Crowd normalerweise besser ist als die Entscheidung der einzelnen Teilnehmer. Die integrierten Ergebnisse erzielten eine durchschnittliche Positionierungsgenauigkeit von 0,211m und eine durchschnittliche IoU von 0,738. Zusammenfassend lässt sich sagen, dass die crowd-basierte Fahrzeugerfassung aus 3D LiDAR Daten mit hoher Genauigkeit durchgeführt werden kann.
Literatur
Ester, Martin ; Kriegel, Hans-Peter ; Sander, Jörg ; Xu, Xiaowei u.a.: A density-based algorithm for discovering clusters in large spatial databases with noise. In: Proceedings of Second International Conference on Knowledge Discovery and Data Mining Bd. 96, 1996, S. 226–231.
Ansprechpartner

Volker Walter
Dr.-Ing.Gruppenleiter Geoinformatik