Ivan Shiller
Entzerrung von Infrarot- sowie CCD-Aufnahmen zur Messung von Oberflächentemperaturen
Dauer der Arbeit: 4 Monate
Abschluss: Juni 2018
Betreuer: Dipl.-Ing. Stefan Brack
Prüfer: Prof. Dr.-Ing. Norbert Haala
Motivation
Die Temperatur ist die wichtigste physikalische Größe in der Thermodynamik. Entsprechend werden Temperaturmessungen in vielen Forschung- und Industriebereichen eingesetzt. Diese Arbeit basiert auf bildgebenden Temperaturmessmethoden. Dabei wird die Strahlungstemperatur mit Hilfe eines Sensors gemessen. Solche Verfahren haben viele Vorteile. Vor allem können unterschiedliche Objekte und Szenen global betrachten werden. Im Gegensatz zu den lokalen Methoden können die kontaktlosen Messungen hochfrequent und langandauernd sein (z.B. Video-Sequenz). Die Analyse und Verarbeitung der Messdaten erfordert jedoch eine geometrisch richtige Darstellung der Messobjekte. Die Bilder werden im Regelfall von einem beliebigen, nicht optimalen Kamerastandpunkt aufgenommen. Das bedeutet, dass ebenförmige Testobjekte seitlich beobachtet werden und eine Abbildung des Objektes dementsprechend perspektivisch verzerrt wird. Im Rahmen dieser Arbeit sollte nun ein geeigneter Entzerrungsalgorithmus für die Aufnahmen der ebenen Oberflächen entwickelt werden. In einem entzerrten Bild bleiben unterschiedliche geometrische Merkmale des Objekts, wie z.B. Winkel und Abstände, erhalten. Damit können diese direkt gemessen und ausgewertet werden.
Vorgehensweise
Die Messdaten werden an einem Versuchsstand des ITLR erfasst. Dafür werden eine IR-Kamera Flir-SC7600 und eine Nikon D800 verwendet. Die perspektivische Verzerrung der Fotoaufnahmen kann mit Hilfe einer projektiven Transformation beschrieben werden. Die Transformationsparameter werden durch die Kleinste Quadrate Ausgleichung berechnet werden. Dabei setzt sich der Beobachtungsvektor aus Koordinaten der Passpunkte, welche das Bild mit dem Objektraum verbinden.

Um eine ausreichende Anzahl der stabilen Passpunkte zu gewährleisten, wird ein Punktmusterkonzept entwickelt. Dabei können mehrere Parameter so spezifiziert werden, dass ein am besten passendes Muster für jede konkrete Situation erstellt werden kann. Außerdem können dadurch die automatisierte Punkterkennung und Punktidentifizierungsmethoden eingesetzt werden.
Im nächsten Schritt wird ein Referenzbild aufgenommen. Das Ziel dieser Referenzmessung ist die Erstellung einer sortierten Liste der Punktkorrespondenzen. Diese entsteht aus Bild- und Objektkoordinaten der entsprechenden Passpunkte. Bei der Verwendung eines Musters können die auf der Korrelation basierten Punkterkennungsverfahren zum Einsatz kommen. Alternativ kann die Referenzmessung auch ohne Muster durchgeführt werden. Allerdings sind dafür die manuellen Messungen der Passpunkte erforderlich.
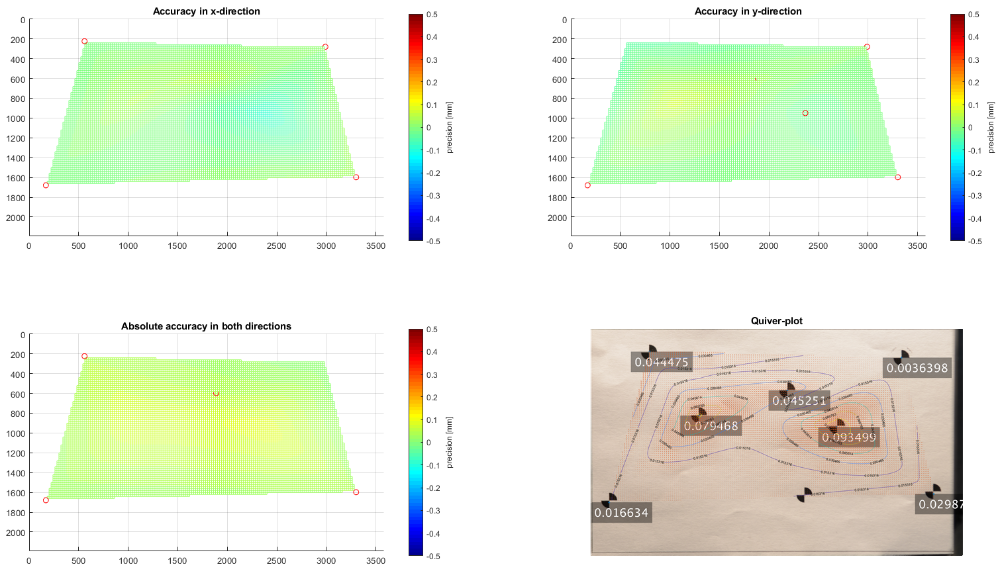
Anschließend wird die berechnete Liste der Punktkorrespondenzen verwendet, um die Entzerrungstransformation zu berechnen. Einmal berechnet, kann diese für alle weiteren Aufnahmen vom selben Kamerastandpunkt verwendet werden. Zusätzlich wird eine Genauigkeitsabschätzungsmethode entwickelt. Diese wird verwendet, um die fehlerhaften Messungen zu erkennen und optimieren.
Ergebnisse und Fazit
Im Rahmen dieser Arbeit werden ein allgemeiner Entzerrungsalgorithmus, sowie die zusätzliche, unterstützende Funktionen entwickelt. Diese dienen besonders dazu, das Programm für die Verwendung auf einem konkreten Versuchsstand zu optimieren. Jedoch kann das Programm universell für die Berechnung der projektiven Transformation eingesetzt werden. Unter anderem werden die Aspekte der Verwendung der unterschiedlichen Zielmarken diskutiert.
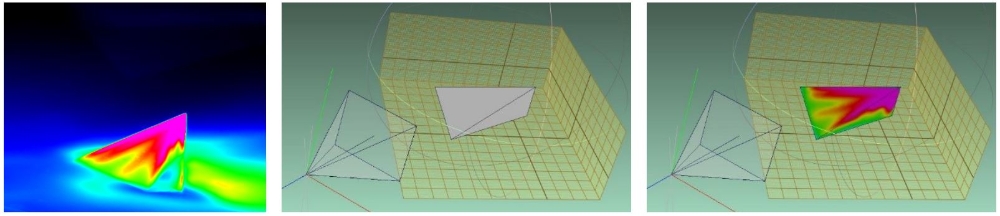
Der einheitliche Datenexport wird durch das Programm gewährleistet, was für die praktischen Anwendungen eine wichtige Rolle spielt. Außerdem wird ein Ausblick über die möglichen Methoden der Bearbeitung der 3D Daten mit Hilfe der Software MeshLab gegeben.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter