Franziska Nied
Band-zu-Band Registrierung UAV-gestützter MS-Kameras
Dauer der Arbeit: 4 Monate
Abschluss: Oktober 2017
Betreuer: Dr.-Ing. Michael Cramer
Prüfer: Prof. Dr.-Ing. Uwe Sörgel
Motivation
Für eine Klassifizierung sind die häufig genutzten Bayer-Sensoren nicht geeignet, da ein Pixel nur für einen bestimmten Spektralbereich sensibilisiert ist. Somit müssen die Grauwerte der weiteren Spektralbereiche interpoliert werden, was für eine Klassifizierung nicht optimal ist. Aus diesem Grund braucht man Sensoren, welche an jeder Stelle alle gewünschten spektralen Anteile speichert. Bisher gibt es jedoch nur einen Hersteller eines solchen Sensors (Foveon X3 von Sigma).
Durch ein Mehrkopf-System mit verschiedenen Kameraköpfen kann diese Problematik alternativ gelöst werden. Die einzelnen Sensoren werden hierbei auf einen schmalbandigen Spektralbereich sensibilisiert. Auf diese Weise schöpfen die Sensoren über die gesamte Fläche den vollen und vor allem wahren Informationsgehalt aus. Die Kameraköpfe des Systems werden simultan ausgelöst. Außerdem haben die Sensoren am Kamerakörper unterschiedliche Positionen und Blickwinkel. Weiterhin sind die Linsenverzeichnungen der Optiken verschieden. Bei Überlagerung aller Bilder eines Aufnahmezeitpunktes entsteht somit eine Parallaxe.
 |
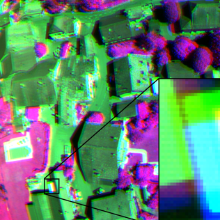
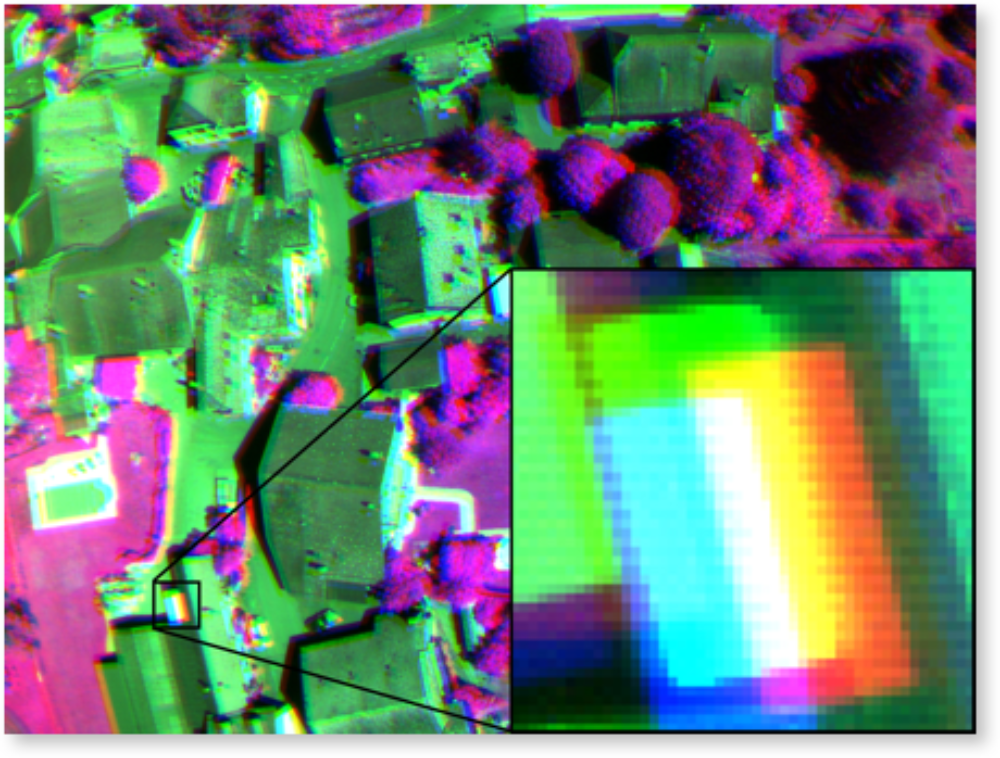
| Abbildung 1: Unregistrierte Bänder weisen eine Parallaxe auf |
Verfahren
Für eine weitere Bildverarbeitung und Analyse ist es also notwendig die Bilder aufeinander abzubilden, sodass gleiche Bildkoordinaten in allen Bändern dasselbe Pixel darstellen. Daraus folgt, dass alle Bilder eine einheitliche Geometrie besitzen müssen. Der Prozess der Transformation eines Bildes aus einem bestimmten Band auf ein weiteres Bild eines anderen Bandes ist die sogenannte Band-zu-Band-Registrierung.
Ein gängiges Registrierungsverfahren basiert auf Verknüpfungspunkten zwischen den Bändern, welche für die Schätzung einer mathematischen Transformation herangezogen werden. Durch die unterschiedlichen Reflexionseigenschaften und somit Intensitätswerten der einzelnen Kanäle birgt diese Methode dennoch Probleme bei der Merkmalsanpassung schmalbandiger Sensoren. Die Genauigkeit des Verfahrens hängt im Wesentlichen von der Anzahl der Transformationsparameter und der Genauigkeit des Merkmal-Detektors ab.
Des Weiteren existiert ein Verfahren, welches die inneren und relativen Orientierungen der Kameraköpfe als Parameter für eine Transformation nutzt. Um diese zu erhalten folgt zunächst eine Kalibrierung des Kamerasystems. Das Registrierungergebnis hiervon ist jedoch noch nicht optimal, da die Parameter aus der Kalibrierung fehlerbehaftet sind. Deshalb wird ein Korrekturmodell angebracht, welches sich auf die Genauigkeiten der Kalibrierung stützt und durch Fehlerfortpflanzung verbleibende Systematiken modelliert. Hierzu sind Verknüpfungspunktmessungen erforderlich, was wiederum mit der Problematik der Merkmalsanpassung einhergeht.
Fazit
Beide Verfahren sind in der Lage eine hohe Passgenauigkeit zu erreichen. Das Ziel ist eine Minimierung der Pixeldifferenzen zwischen den Verknüpfungspunkten. Mit einer endgültigen Differenz von durchschnittlich 0.25 bis 0.35 Pixeln liefern sowohl die Methode der mathematischen Modelle, als auch das Verfahren über die Kalibrierungsparameter eine hohe Genauigkeit. Für eine Klassifizierung mit überwiegend Vegetation ist das Verfahren über eine Kalibrierung besser geeignet, da das nachträgliche Korrekturmodell aus Bildverbänden mit vielen Verknüpfungspunkten auf Verbände mit wenigen Merkmalen übertragen werden kann, wenn das Kamerasystem stabil genug ist.
 |
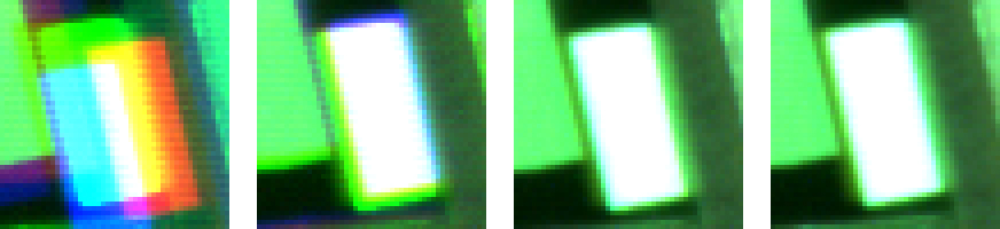
| Abbildung 4: Registrierte Bänder weisen kaum Überlagerungsdifferenzen auf |
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme