Lina Budde
Fusion von 3D-Punktwolken aus Stereo-Bildzuordnung und Laserscanning zur Verbesserung von digitaler Oberflächenmodellen
Dauer der Arbeit: 4 Monate
Abschluss: September 2017
Betreuer: Dr. techn. Gottfried Mandlburger
Prüfer: Prof. Dr.-Ing. Norbert Haala
Motivation
Für zahlreiche Anwendungen, wie beispielsweise Orthophotos oder 3D Stadtmodelle, werden digitale Oberflächenmodelle benötigt. Diese Oberflächenmodelle können entweder auf Grundlage von photogrammetrischen Aufnahmen über eine Stereo-Bildzuordnung oder aus dem Laserscanning generiert werden. Jedoch weisen die beiden Erfassungssysteme unterschiedliche Vor- und Nachteile auf. Zu den Nachteilen bei der Stereo-Bildzuordnung gehören vor allem die Probleme bei fehlender Textur und Abschattungen. Das Laserscanning dagegen kann unabhängig von der Textur Höhen messen und eine Messung des Objektpunktes reicht aus, um dessen Koordinaten zu bestimmen. Das Ziel diese Bachelorarbeit erarbeitet eine Strategie zur Erstellung verbesserter Oberflächenmodelle durch die gemeinsame Nutzung von 3D-Punktwolken aus zeitgleich erfassten Laser- und Bilddaten.
Vorgehensweise
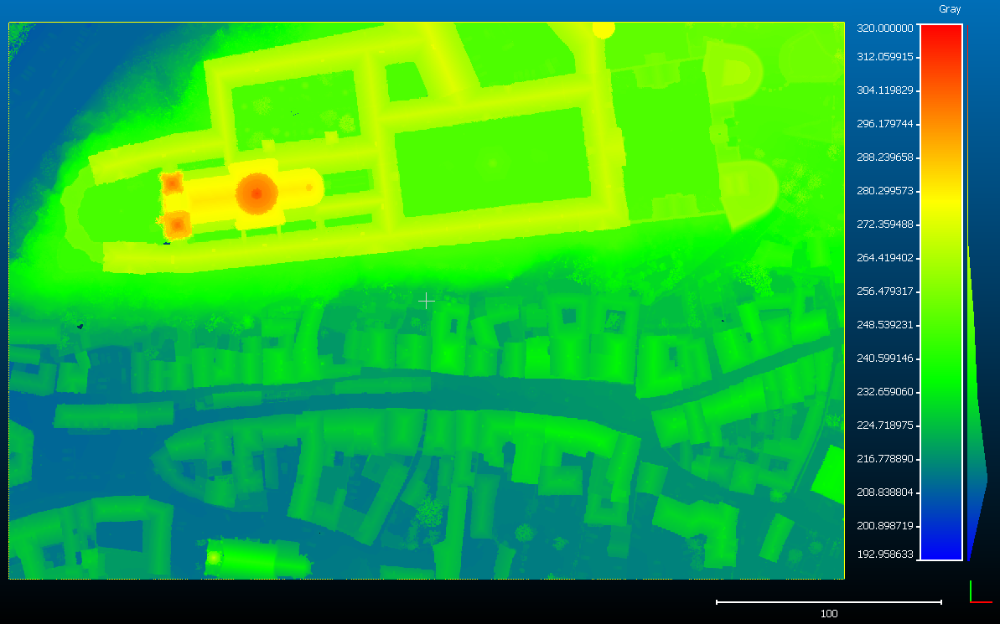
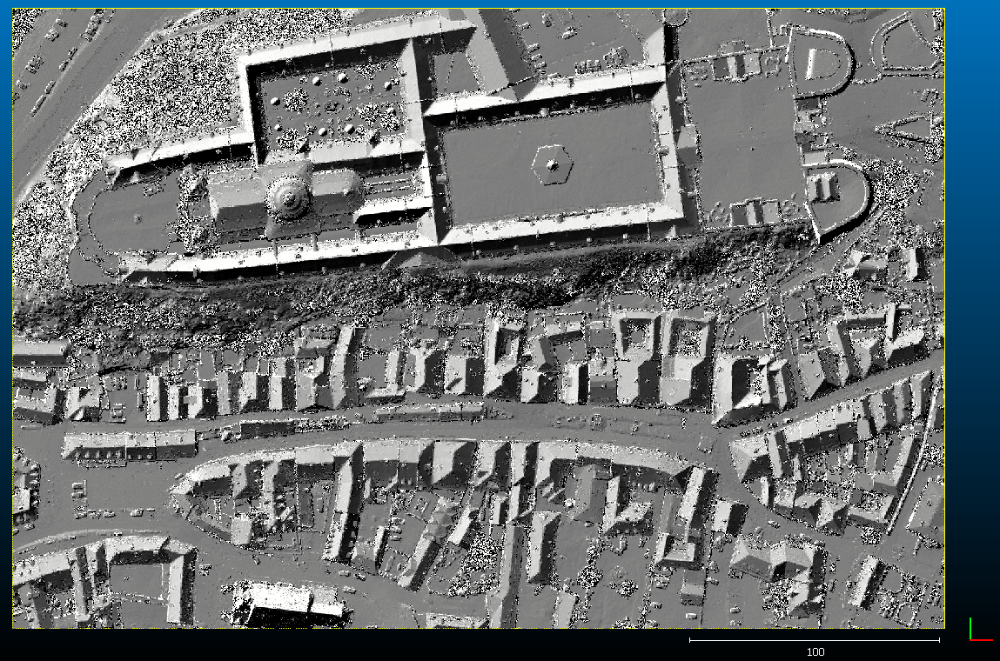
Für die Verarbeitung werden zwei verschiedene Software-Systeme verwendet, zum einen SURE und zum anderen OPALS. Als Datengrundlage dienen eine Punktwolke aus dem Laserscanning und gleichzeitig erfasste photogrammetrische Aufnahmen. Die Datenerfassung erfolgte am 14.1.2016 über der österreichischen Stadt Melk (48°14'N 15°21'E). Vor der Fusion der Daten werden getrennt voneinander digitale Oberflächenmodelle aus den photogrammetrischen Aufnahmen und der Laserpunktwolke erzeugt (siehe Abbildung 1).
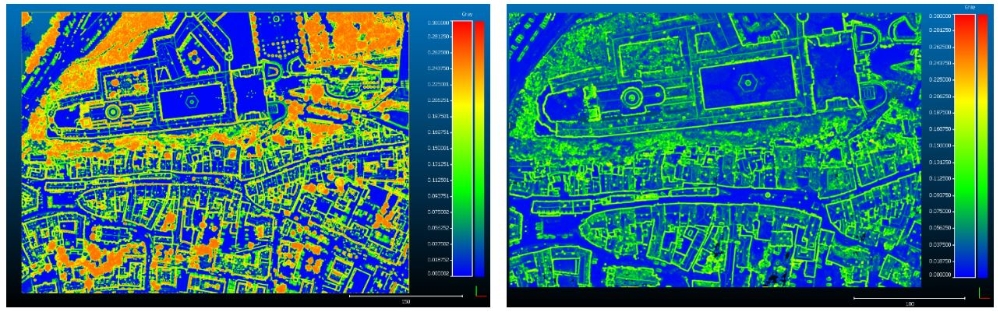
Anschließend werden die Punktdichten dieser Rastermodelle bestimmt. Dies liefert erste Unterschiede zwischen den beiden Erfassungsmethoden. Diese Informationen könne für die folgenden Verarbeitungsschritte genutzt werden. Im nächsten Schritt werden die Lücken, die bei der Stereo-Bildzuordnung entstehen, mit den Laserdaten aufgefüllt. Des Weiteren werden für die beiden Modelle für jeden Punkt Flächennormalvektoren bestimmt. Als Nebenprodukt ergibt sich eine Standardabweichung σ0, die ein Maß für die lokale Rauigkeit darstellt (siehe Abbildung 2). Über einen Vergleich dieser lokalen Rauigkeiten können diejenigen Bereiche identifiziert werden, die bei der Stereo-Bildzuordnung eine größere Rauigkeit aufweisen als beim Laserscanning. Denn dies betrifft vor allem Bereiche, die in Wirklichkeit glatt sein sollten wie zum Beispiel Dachflächen. Durch das Ersetzen dieser lokal raueren Bereiche durch Laserscanningdaten, weisen diese Flächen nach der Fusion eine größere Glattheit auf.
Ergebnisse und Fazit
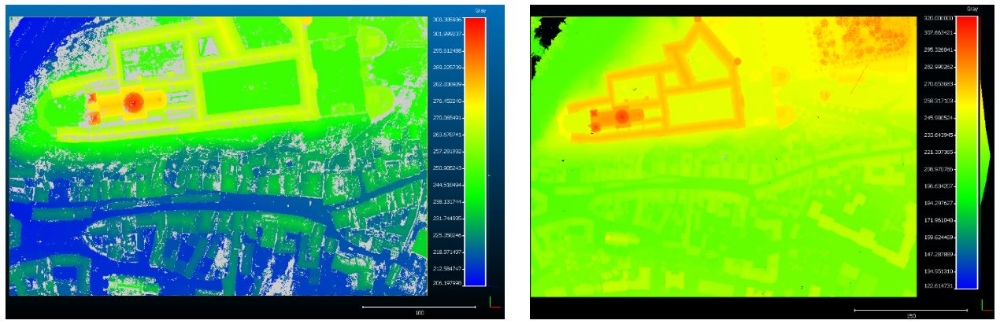
Nachdem die Verbesserungsmöglichkeiten einzeln betrachtet wurden, können diese zu einem Gesamtergebnis überführt werden. Dadurch ergibt sich ein Anteil von 60% Laserpunkten am gesamten Oberflächenmodell (siehe Abbildung 3). Das fertige digitale Oberflächenmodell (Abbildung 4) weist eine größere Vollständigkeit und weniger Rauschen an glatten Oberflächen auf als bei der alleinigen Verwendung des Ergebnisses aus dem Stereo-Bildzuordnung und eine größere Punktdichte als bei der Verwendung eines Oberflächenmodells aus Laserdaten. Somit liegt eine Verbesserung des digitalen Oberflächenmodells vor.