Thomas Usche
Untersuchung von Softwarepaketen zur bildbasierten Rekonstruktion eines historischen Kraftfahrzeugs
Dauer der Arbeit: 4 Monate
Abschluss: Oktober 2016
Betreuer und Prüfer: apl. Prof. Dr.-Ing. Norbert Haala
Motivation
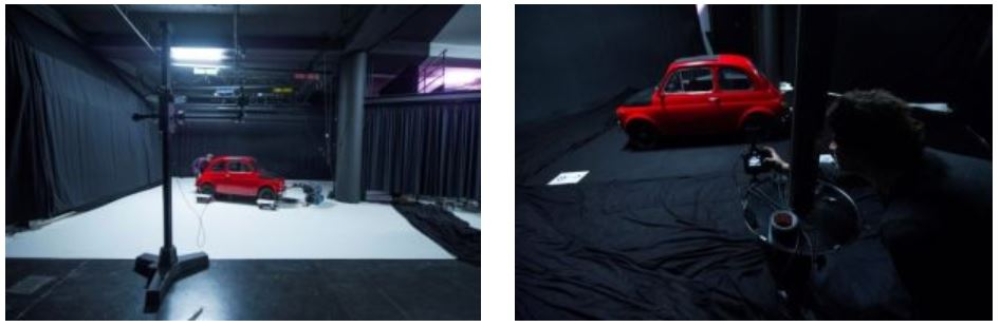
Historische Kraftfahrzeuge sind oftmals Unikate die nur noch einmal in ihrer Form existieren. Deshalb ist der Besitzer darauf bedacht so wenig wie möglich am Urzustand seines Fahrzeugs zu verändern. Die Motivation dieser Arbeit ist deshalb eine bildbasierte Rekonstruktion eines historischen Kraftfahrzeugs [Abbildung 1] ohne an diesem Veränderungen vorzunehmen, wie zum Beispiel das Aufbringen eines Mattsprays auf die Lackoberfläche.
Für die bildbasierte Rekonstruktion werden Bilder mit einer Digitalkamera in einem Fotostudio aufgenommen. Diese Aufnahmen werden in fünf verschiedene Softwarepakete (aspect 3D – ArcTron 3D, Memento / ReMake – Autodesk, PhotoScan – Agisoft, RealityCapture – CapturingReality und SURE – nFrames) importiert und die generierten Ergebnisse jeweils miteinander verglichen.
Eine reflektierende Oberfläche ist bei der bildbasierten Rekonstruktion die größte Herausforderung. So kann die Software bei Gegenständen, die stark an der Oberfläche reflektieren keine Verknüpfungspunkte finden, die aber für eine 3D-Rekonstruktion wiederum zwingend nötig sind, um die X-,Y-, und Z-Koordinaten einer Punktwolke herauszufinden, die aus der Berechnung der Bilder entsteht.

Vorgehensweise
Die Versuchsdurchführung besteht aus zwei Teilen, zuerst aus der Bilderfassung und dann aus der Bildprozedur.
Für die Bilderfassung gibt es zwei Möglichkeiten [Abbildung 2]. Es wird unterschieden in einer ersten Methode, in der die Kamera stationär steht und das Objekt um die eigene Achse gedreht wird. Und einer zweiten Methode, in der die Kamera im Kreis um das Objekt bewegt wird und dabei das Objekt im Mittelpunkt fest stehen bleibt.
Stichwortartige Beschreibung des Vorgehens der Methode: Stationären Kamera
- Kreis mit 5m Durchmesser um das Objekt erstellen.
- Im Abstand von 15° auf dem Kreis Punkte markieren.
- Objekt auf Kreismittelpunkt in Richtung eines markierten Punkts ausrichten.
- Fotoaufnahme mit starker Lichtquelle von oben in vier verschiedenen Höhen.
- Wiederholung Punkt 3. + 4. im Abstand von 15° bis Beginn des ersten Punkts.
Stichwortartige Beschreibung des Vorgehens der Methode: Bewegten Kamera
- Fotostudio auslegen mit schwarzem Bühnenmolton
(Grund: Spiegelung von hellem Boden in der Oberfläche des Kraftfahrzeugs.)
- Kreis mit 5m Durchmesser um das Objekt erstellen.
- Im Abstand von 15° auf dem Kreis Punkte markieren.
- Kamera auf das Objekt aus Richtung eines markierten Punkts ausrichten.
- Fotoaufnahme mit starker Lichtquelle von oben in vier verschiedenen Höhen.
- Wiederholung Punkt 4. + 5. im Abstand von 15° bis Beginn des ersten Punkts.
Im Versuch wurden jeweils dieselben Bilder der einzelnen Verfahren (stationär und bewegte Kamera) in die Softwarepakete importiert. Jedes Programm hat diverse Einstellungsmöglichkeiten, es wurde versucht mit der zur Verfügung gestandenen Hardware für jedes Softwarepaket das bestmöglichste 3D-Modell ohne Nachbearbeitung zu generieren. Zu-erst wird dabei eine Bündelblockausgleichung durchgeführt, dann die Punktwolke erzeugt und daraus eine Mesh, die am Schluss noch texturiert wird.
Ergebnisse und Schlussfolgerung
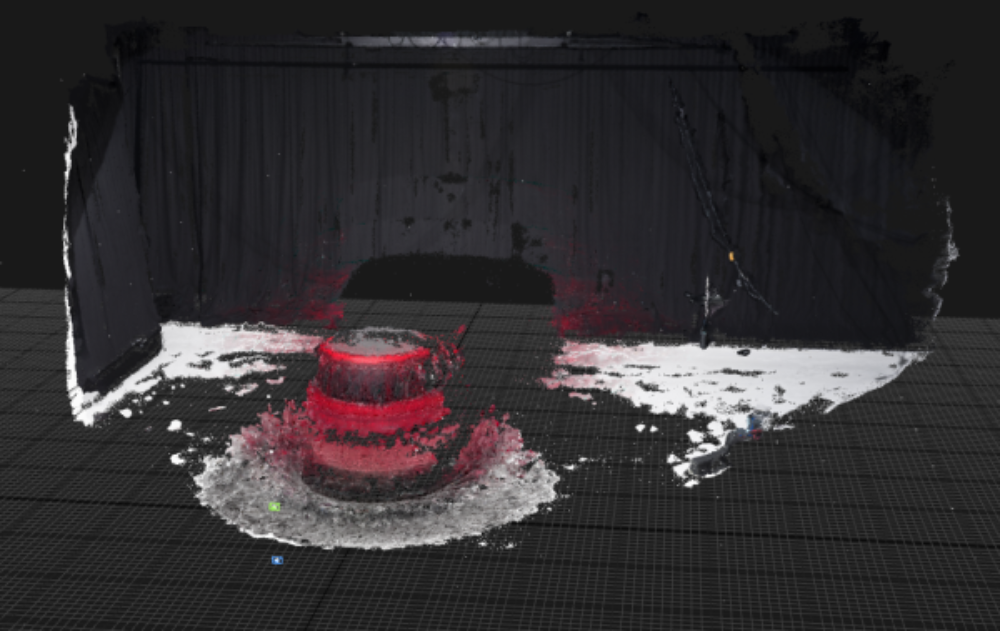
Bei der Methode der stationären Kamera traten bei allen getesteten Softwarepaketen Probleme auf. Diese sind auf die Aufnahme Methode zurück zu führen. Der Grund ist, dass die Programme sich auf den Hintergrund fokussieren und somit das Kraftfahrzeug nicht oder nicht korrekt, sondern als bewegtes Objekt [Abbildung 3] dargestellt wird.
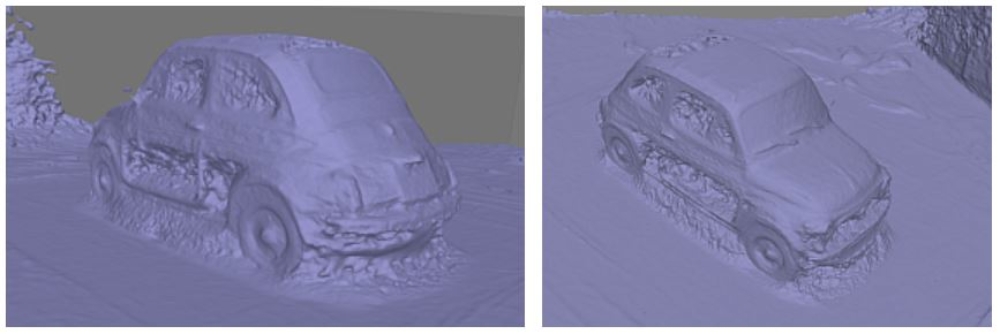
Mit der Aufnahmemethode, der bewegten Kamera, erzielten alle Softwarepakete ein akzeptables Ergebnis [Abbildung 4]. Es konnte jedoch keines der Programme ein perfektes 3D-Modell generieren, da jedes Softwarepaket an irgendeiner Stelle Probleme aufzuweisen hatte. Häufige Problemzonen waren, das Dach, die Seite und der Spiegel [Abbildung 5] des Fiats 500.

In dieser Bachelorarbeit konnte kein aussagekräftiger Vergleich zwischen den Softwarepaketen durchgeführt und auch keine abschließende Bewertung erarbeitet werden. Der Grund dafür sind die noch zu ungenauen Punktwolken, bzw. Meshes. Trotzdem konnte eine Beurteilung für jedes Programm durchgeführt werden, in der die Schwächen, sowie Stärken herausgearbeitet wurden.
Die Schlussfolgerung dieser Arbeit ist, dass das Problem der Reflexion nicht behoben werden konnte und die Softwareprogramme im Moment deshalb noch zu ungenaue Punktwolken, bzw. Meshes erzeugen. Der Versuchsaufbau muss verbessert werden, um eine bessere Qualität der Bilder zu erreichen. Dann erst könnten die Softwarepakete daraus bessere 3D-Modelle generieren.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter