Felix Sabow
Direkte Georeferenzierung von UAV-Anwendungen
Dauer der Arbeit: 4 Monate
Abschluss: März 2016
Betreuer: Dr.-Ing. Michael Cramer
Prüfer: apl. Prof. Dr.-Ing. Norbert Haala
Motivation
Eine der Hauptaufgaben der Landesvermessung ist es qualitativ hochwertige und aktuelle Geobasisinformationen bereitzustellen. Luftbilder stellen eine typische Form der Ausgangsdaten dar, aus denen diese Geobasisdaten abgeleitet werden können. Um eine hohe Aktualität der Geobasisinformationen gewährleisten zu können, müssen diese ständig fortgeführt werden. Daher besteht großes Interesse die kostenintensive Erfassung der Ausgangsdaten zu optimieren. Ziel dieser Arbeit war die Untersuchung des Verfahrens der direkten Georeferenzierung in einer UAV-Anwendung. Laut Anforderungen der Landesvermessung soll die Einzelpunktgenauigkeit der dichten 3D-Punktwolke 10 cm betragen.
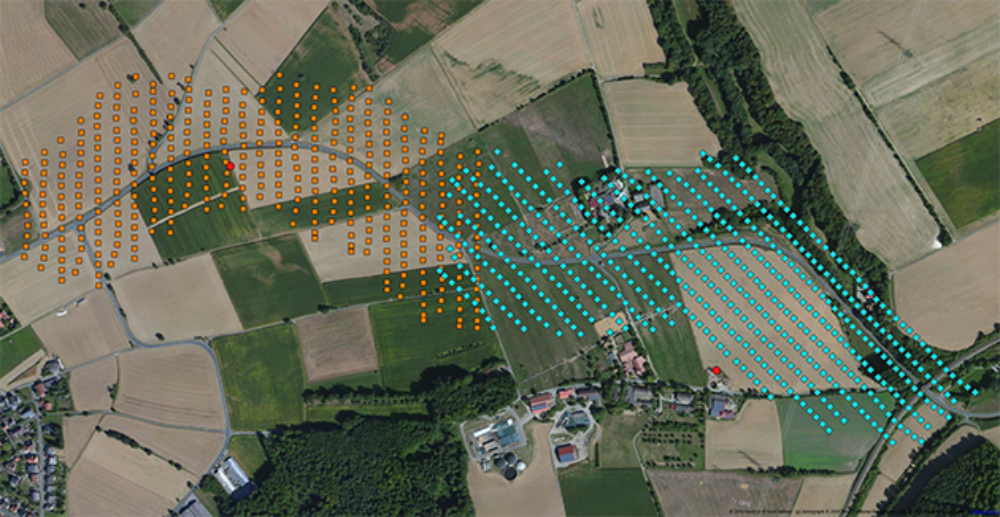
In den Jahren 2011 und 2012 wurden an der Landstraße L583 im Neckar-Odenwald-Kreis weitreichende Straßenbaumaßnahmen durchgeführt. Hierdurch ergaben sich Veränderungen im Gelände und ein neuer Straßenverlauf. Zur Aktualisierung der Geobasisdaten wurde im Auftrag des LGL das betroffene Gebiet mit dem UAV-System MAVinci Sirius Pro durch eine klassische Blockbefliegung photogrammetrisch erfasst. In Abbildung 1 sind die beiden aufgenommenen Bildverbände (insg. 908 Bilder) zusehen, welche sich zur späteren Verknüpfung in einem etwa 100 m breiten Bereich überlappen. Die photogrammetrische Auswertung erfolgte ohne die Verwendung von Passpunkten, da lediglich die Koordinaten der zwei Referenzstationspunkte zur Verfügung standen. Hierzu kamen die beiden unabhängigen Softwarepakte Agisoft PhotoScan und Trimble UASMaster zum Einsatz.
Vorgehensweise
Für die Genauigkeitsuntersuchungen wurden vom LGL Referenzdaten zur Verfügung gestellt. Dabei handelte es sich um 13 mit statischem GNSS eingemessene natürliche Punkte, kinematisch erfasste Straßenprofile und ein digitales Geländemodell aus der Laserscannerbefliegung.
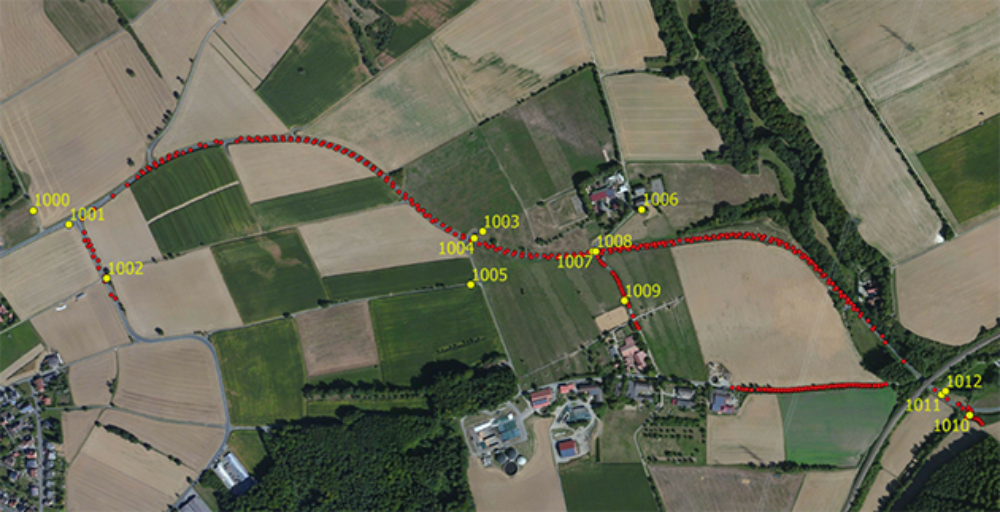
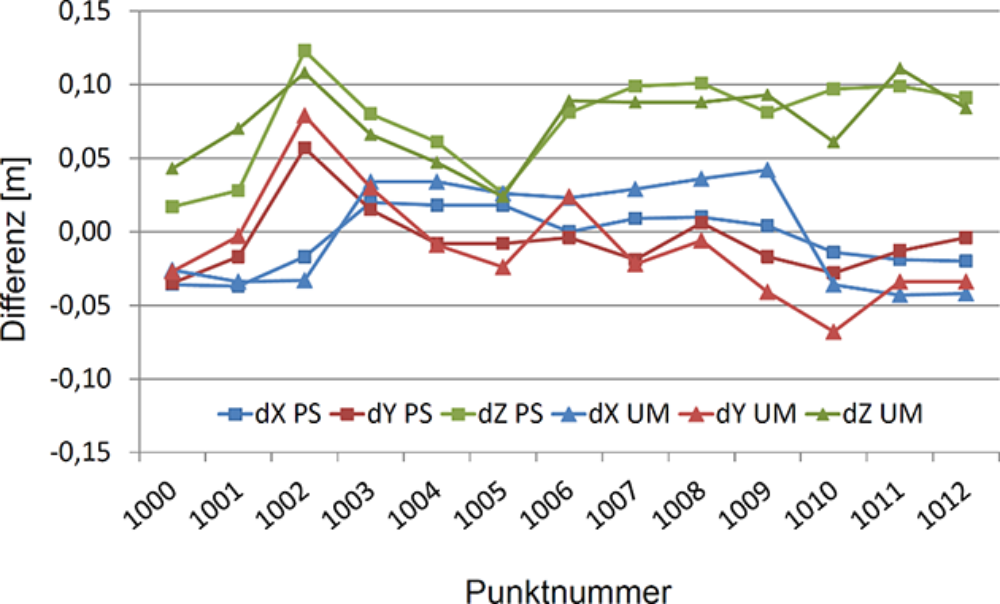
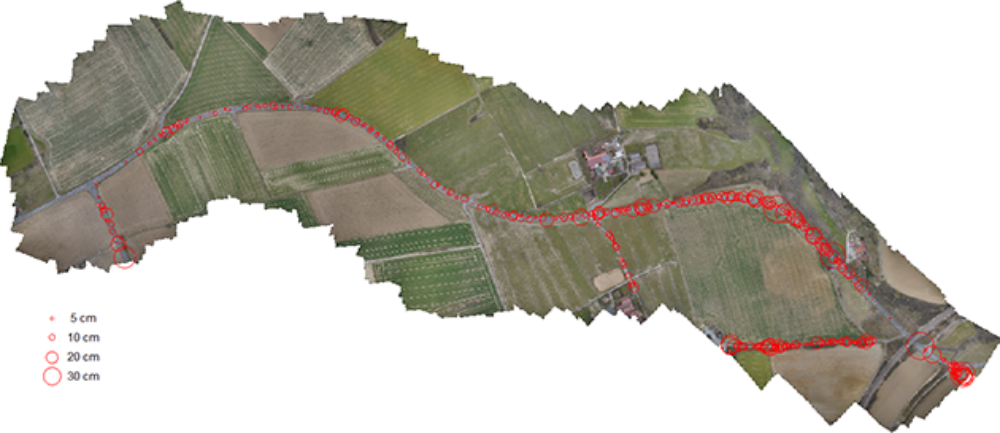
Zur Beurteilung der 3D-Einzelpunktgenauigkeit wurden die 13 natürlichen Punkte mit PhotoScan und UASMaster photogrammetrisch gemessen. Anschließend konnten die Differenzen zu den Referenzwerten des LGL bestimmt werden. Die Abweichungen an den einzelnen Kontrollpunkten sind in Abbildung 3 zu sehen. Mit beiden Softwarepakten wurden sehr ähnliche Ergebnisse erzielt. Es ist allerdings in beiden Fällen ein Offset der Vertikalkomponente zu erkennen. Bei einer GSD von 3 cm konnte in der Lage eine Genauigkeit von rund 1 pix und in der Höhe von etwa 2.5 – 3 pix erzielt werden.
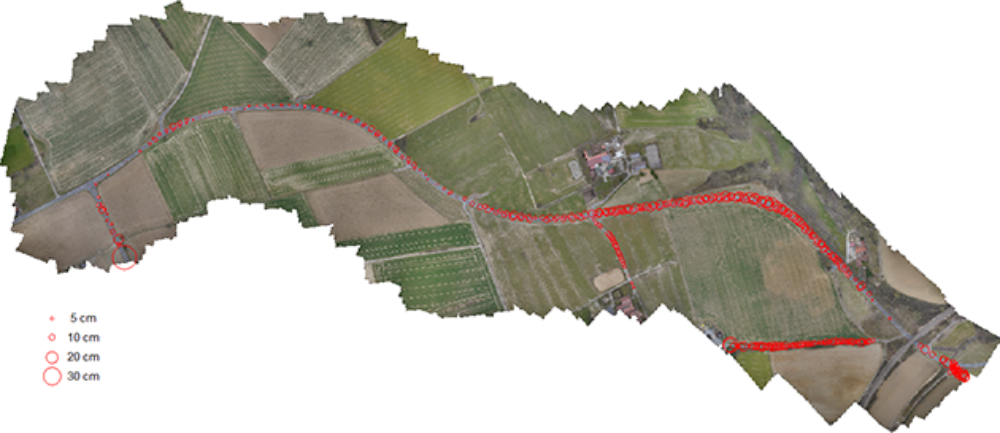
Das DGM des LGL und die GNSS-Straßenprofile wurden für die Untersuchung der flächenhaften (Höhen-)Genauigkeit verwendet. Die Höhen der kinematisch erfassten Geländepunkte wurden in den, im Rahmen der Auswertung erstellten, Oberflächenmodellen interpoliert, um dann die entsprechenden Vertikaldifferenzen (Abb. 4 & 5) zu berechnen. Größere Abweichungen konnten vor allem im Randgebiet und in Bereichen mit stärkerer Abschattung festgestellt werden. Während die Ergebnisse von UASMaster eine deutlich höhere Streuung aufweisen, wurde mit beiden Softwarepaketen eine ähnliche Genauigkeit von etwa 3-4 pix erreicht. Die so erzielte Höhengenauigkeit ist zwar geringer als bei der 3D-Einzelpunktbestimmung, es muss allerdings auch beachtet werden, dass die statisch gemessenen Referenzpunkte bereits mit einer deutlich höheren Genauigkeit erfasst wurden als die kinematische Straßentrajektorie.
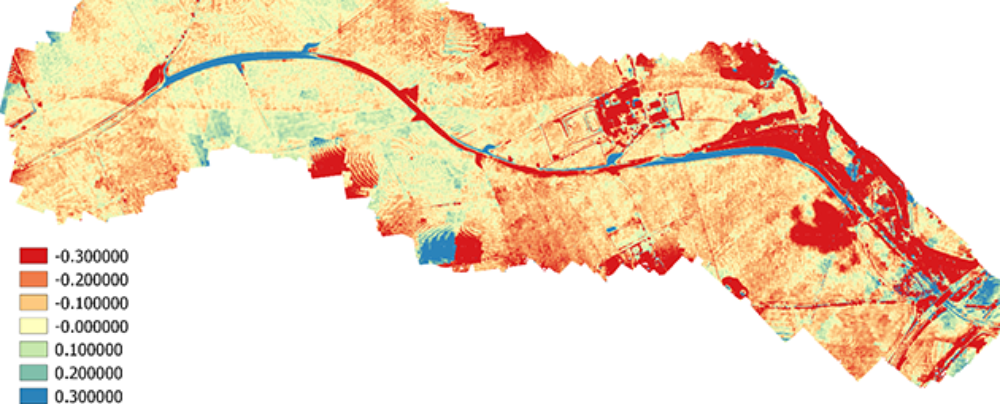
Abschließend wurde die Differenz zwischen den Oberflächenmodellen und dem Geländemodell gebildet. Die Ergebnisse sind in den Abbildungen 6 & 7 zu sehen. Größere Differenzen zwischen den Oberflächenmodellen aus PhotoScan und UASMaster treten im Randgebiet, in Bereichen mit Vegetation und an Gebäudekanten auf. Wie erwartet liegen die Differenzen aber größtenteils im Bereich von -10 bis 10 cm.
Da das Geländemodell aus Laserscannerbefliegungen aus den Jahren 2002 - 2005 abgeleitet wurde, zeigen sich bei der Differenzbildung mit den Oberflächenmodellen deutlich die aufgrund der Baumaßnahmen entstandenen Veränderungen im Gelände und an der Straße. Größere Differenzen treten natürlich auch in Bereichen auf in denen die tatsächliche Geländeoberfläche von der sichtbaren Oberfläche abweicht. Bei beiden Vergleichen mit dem DGL sind quer durch das Gebiet verlaufende Versätze zwischen den Höhenmodellen zu sehen. Grund hierfür sind Restsystematiken aus den Streifenanpassungen bei der Auswertung der Laserscannerbefliegungen.

Fazit
Mit dieser Arbeit konnte gezeigt werden, dass die Genauigkeitsanforderungen der Landesvermessung erfüllt werden können und die aus den UAV-Daten generierten Oberflächenmodelle sich somit zur Fortführung des landesweiten Geländemodells eignen. Der Verzicht auf Passpunkte im Verlaufe der Auswertung bietet enormes Potential zur Effizienzsteigerung, da der Aufwand um Passpunkte einzumessen und zu signalisieren komplett entfallen kann. Außerdem bieten sich so natürlich auch Möglichkeiten nicht zugängliche Gebiete ohne vorhandene Passpunkte zu erfassen. Die UAV-Datenerfassung stellt somit eine gute Ergänzung zu den bisherigen Verfahren von klassischen Bildflügen und terrestrischen Laserscanneraufnahmen dar.
Anmerkung:
Die Resultate dieser Arbeit wurden in folgendem Konferenzbeitrag publiziert:
Cramer, M., Sabow, F. & Förg, P. (2016): Direkte Georeferenzierung in UAS-Anwendungen – Eine Beispielanwendung der Landesvermessung Baden-Württemberg, Publikationen der DGPF, Band 25, 2016, online verfügbar unter http://www.dgpf.de/src/tagung/jt2016/proceedings/papers/02_DLT2016_Cramer_et_al.pdf
Ansprechpartner

Michael Cramer
Dr.-Ing.Gruppenleiter Photogrammetrische Systeme