Lewin L. Hajer
Voxelbasierte Flugplanung für die photogrammetrische Fassadenerfassung mittels Multikopter
Dauer der Arbeit: 4 Monate
Abschluss: Mai 2016
Betreuer: Dipl.-Ing. Alessandro Cefalu
Prüfer: apl. Prof. Dr.-Ing. Norbert Haala
Motivation
Die Fassade eines Objekts soll mit Hilfe eines Multikopters und einer darauf befestigten Kamera für photogrammetrische Zwecke erfasst werden. Dazu soll sich der Multikopter GNSS-gestützt auf mehreren übereinanderliegenden Flugbahnen um das Objekt bewegen. Ziel dieser Arbeit ist es, Methoden zur automatischen Generierung dieser Flugbahnen sowie der Positionsbestimmung der darauf befindlichen Auslösepunkte für die Kamera zu entwickeln. Die Flugbahnen sollten dabei möglichst kurz sein, aber dennoch so verlaufen, dass die Fassade vollständig erfasst werden kann. Des Weiteren müssen die Flugbahnen an etwaige Hindernisse so angepasst werden, dass diese mit einem gewissen Sicherheitsabstand umflogen werden. Als Grundlage der automatisierten Flugplanung dient eine dreidimensionale Rasterkarte, die die Umgebung des zu erfassenden Objekts darstellt und über das digitale Oberflächenmodell und den Grundrissplan dieser Umgebung erzeugt wird.
Vorgehensweise
Die Voxel (Zellen der 3D-Rasterkarte) gliedern sich in Objekt und Nicht-Objektvoxel. Die Nicht-Objektvoxel enthalten zusätzlich einen Wert, der den Abstand zum nächsten Objektvoxel enthält. Zum Zwecke der einfacheren Handhabung wird jede einzelne horizontale Voxelebene der 3D-Rasterkarte als eigenständige zweidimensionale Rasterkarte (auch Schichtbild genannt) betrachtet. Für jede 2D-Rasterkarte (also für jede Schicht der 3D-Rasterkarte) wird eine eigene Flugbahn berechnet. Jedes Voxel einer Voxelebene entspricht einem Pixel im Schichtbild. Die Grauwerte geben Auskunft über den Abstand zu den Objekten (je heller, desto größer der Abstand; Objekte selbst sind schwarz).

Der Ablauf der Flugplanung lässt sich in folgende vier Punkte gliedern.
Polygone für Flugbahn und Sicherheitszonen aus Schichtbild generieren
Schnittpunkte zwischen Flugbahn und Sicherheitsabstandspolygonen finden und auswerten, um so Verletzungen der Sicherheitszonen zu detektieren
Anpassen der Flugbahn an die Sicherheitszonen
Flugbahn (falls vom Nutzer gewünscht) in Teilflugbahnen unterteilen und Positionsbestimmung der Auslösepunkte für die Kamera
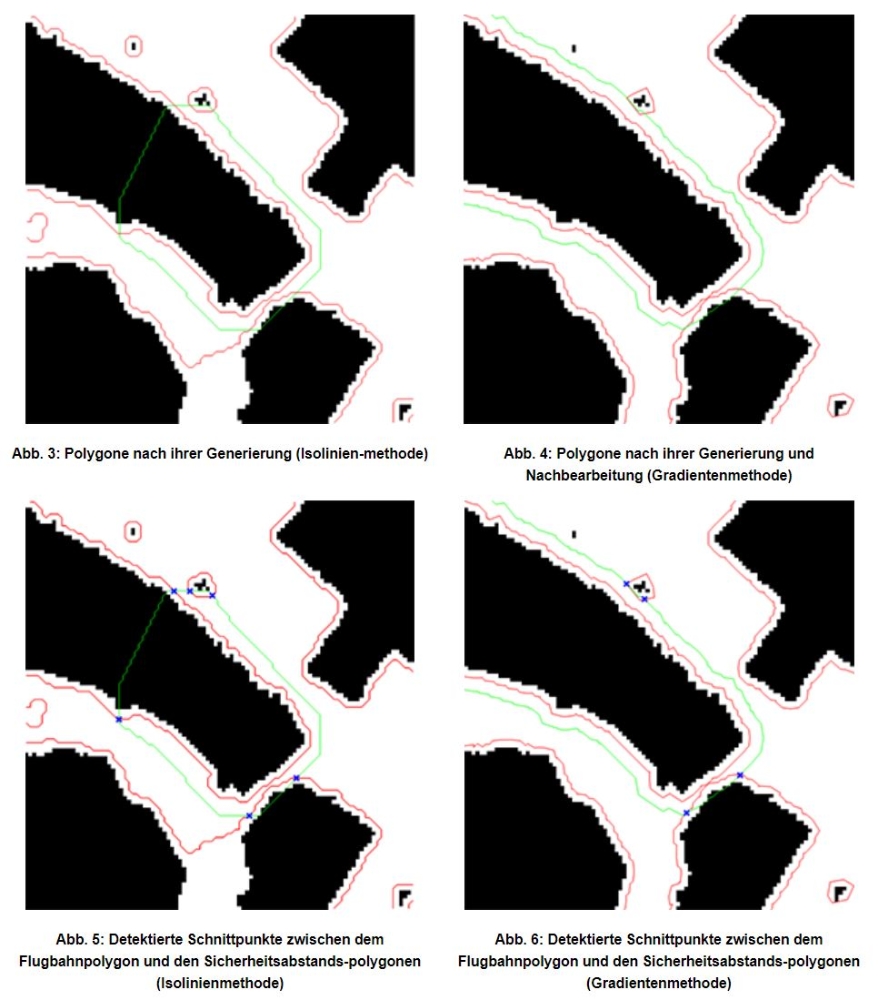
Die Polygongenerierung erfolgt auf zwei unterschiedliche Arten, die beide auf verschiedene Methoden der Bildverarbeitung zurückgreifen. Zum einen werden die Flugbahnen und die Sicherheitsabstandspolygone aus zuvor berechneten Isolinien modelliert („Isolinienmethode“, siehe Abb. 3). Zum anderen werden die einzelnen Punkte der Polygone der Sicherheitszonen und Flugbahnen über die Gradientenrichtung der Randpixel der Objekte polar an diese angehängt („Gradientenmethode“). Hierbei müssen die Polygone anschließend aufgrund von Schleifenbildung einer Nachbearbeitung unterzogen werden (Resultat siehe Abb. 4). Der weitere Ablauf (Punkte 2. bis 4.) unterscheidet sich für beide Methoden teilweise, lässt sich aber wie folgt zusammenfassen.
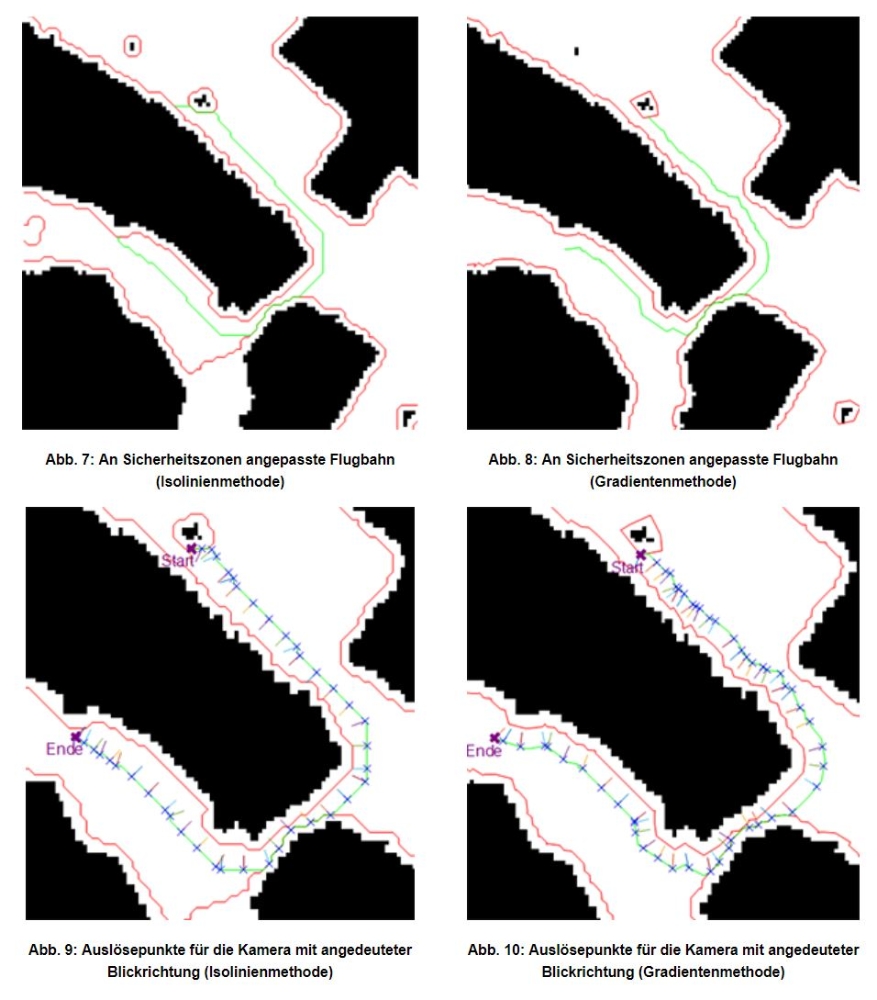
Als nächster Schritt muss das Flugbahnpolygon auf Schnittpunkte mit den Sicherheitsabstandspolygonen überprüft werden, um etwaige Verletzungen der Sicherheitszonen zu detektieren (Punkt 2., siehe Abb. 5 und 6). Ist dies der Fall, wird die Flugbahn so angepasst, dass der Sicherheitsbereich umflogen wird (Punkt 3., siehe Abb. 7 und 8). Zusätzlich wurden Punkte auf den Flugbahnen bestimmt, an denen die auf dem Multikopter befestigte Kamera auslösen soll, um die Fassade zu erfassen (Punkt 4., siehe Abb. 9 und 10). Der dazu entwickelte Algorithmus ist allerdings noch optimierbar.
Ergebnisse und Fazit
Beide angewendete Methoden liefern akzeptable Ergebnisse (siehe Abb. 5 bis 9). Die Isolinienmethode zeichnet sich vor allem dadurch aus, dass sie sehr schnell ist und wenig Nutzeraufwand erfordert. Allerdings spiegeln sich die Formen der Objekte teilweise in den Polygonen nicht wider, wodurch es (im Falle des Flugbahnpolygons) zu Problemen bei der lückenlosen Erfassung der Fassade und (im Falle der Sicherheitsabstandspolygone) zu zu großen bzw. zu kleinen Sicherheitsabständen kommen kann.
Die Polygone der Gradientenmethode sind im Vergleich deutlich bessere an die Objektformen angepasst, die Fassade wird dadurch besser abgetastet. Diese Methode erfordert indessen einen höheren Nutzeraufwand und ist merklich langsamer. Vorteilhaft ist, dass die zu Grunde gelegte Rasterkarte bei dieser Methode keine Abstandsinformationen zur Generierung der Polygone enthalten muss.
Mit dieser Arbeit wurde gezeigt, dass es auf unterschiedliche Art und Weise möglich ist, aus einer 3D-Rasterkarte sinnvolle Flugbahnen und Sicherheitsabstände zu generieren, die in der Praxis eingesetzt werden können.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter