Philipp Schneider
Automatische Erkennung von Gebäudeinfrastrukturelementen in Sensordaten des Project Tango Tablets
Dauer der Arbeit: 4 Monate
Abschluss: Oktober 2015
Betreuer: Dip.-Ing. Max Schneider
Prüfer: Prof. Dr. Norbert Haala
Volltext: https://www.dropbox.com/s/u7wa3dspho0vgdh/Hauptdatei.pdf?dl=0
Motivation
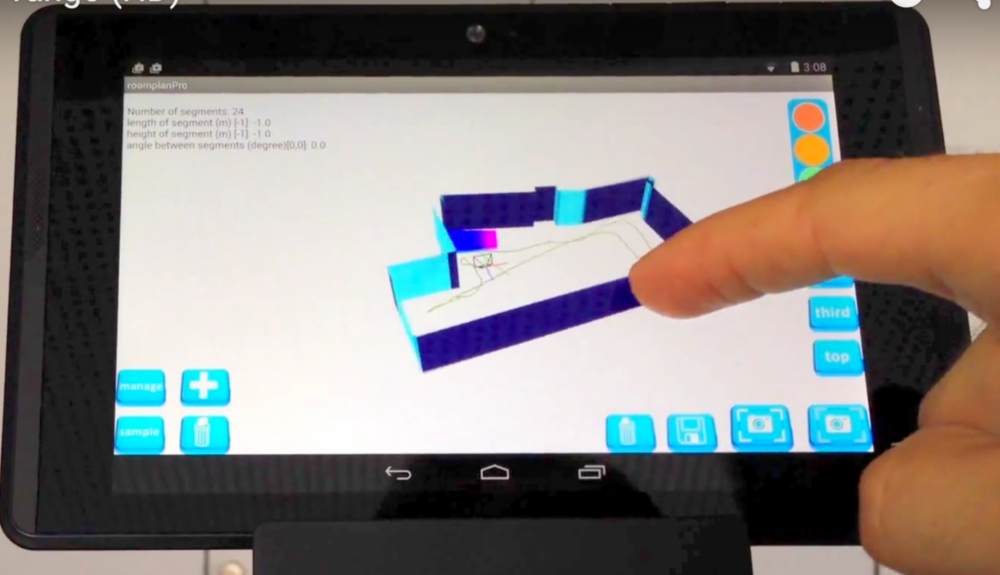
Für die Entwicklung einer App für das Project Tango Tablet von Google, welche es ermöglicht, den Grundriss eines Raumes zu scannen und in ein vektorbasiertes 3D-Model zu überführen [Abb. 1], sollten Infrastrukturelemente wie Steckdosen, Lichtschalter, Türklinken etc. erkannt, lokalisiert und in das Model eingebunden werden. In dieser Arbeit sollen verschiedene Methode aus dem Bereich der Computervision darauf untersucht werden, ob sie sich zur Detektion der entsprechenden Elemente eignet. Außerdem sollen die Sensoren (Kamera und Tiefensensor) auf ihre Tauglichkeit für das Problem geprüft werden.
Umsetzung
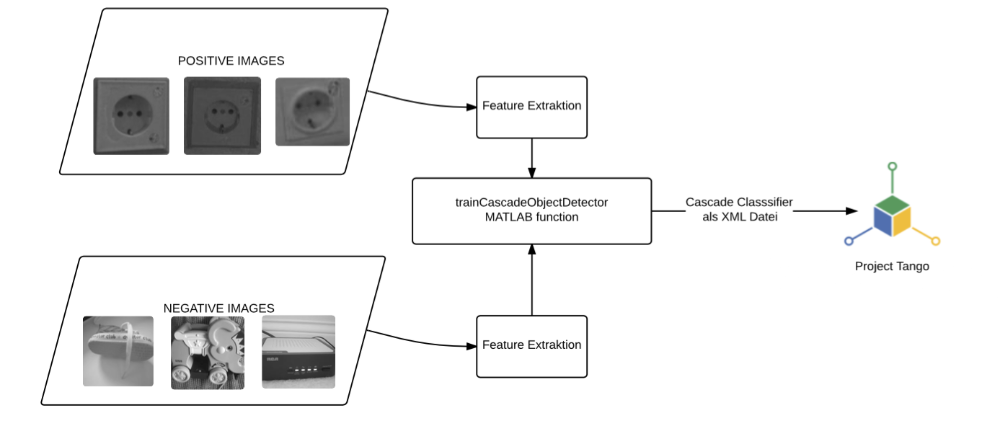
Das Problem der Objekterkennung wurde durch einen Objektdetektor gelöst, welcher eine Kombination von Deskriptor und Klassifikator ist. In Voruntersuchungen zeigte sich, dass nur das Kamerabild des Tabletcomputers genügend Information enthält um diese Aufgabe zu lösen. Es wurde ein Cascade Classifier verwendet, welcher mit den Bildmerkmalen Histogram of oriented Gradients, Haar-like Features und Local Binary Patterns trainiert wurde [Abb.2]. Nach erfolgreichem Einsatz dieser Detektoren in den Livebildern einer Laptopkamera und auf dem Tablet, wurde ein Testverfahren entworfen, um in verschiedenen Aufnahmekonfigurationen die Qualität der Verfahren vergleichen zu können. Außerdem wurde eine Support Vector Machine mit den viel versprechden Histogram of oriented Gradients Merkmalen trainiert, um so ein weiteres Klassifikationsverfahren in die Untersuchung miteinzubeziehen.
Fazit
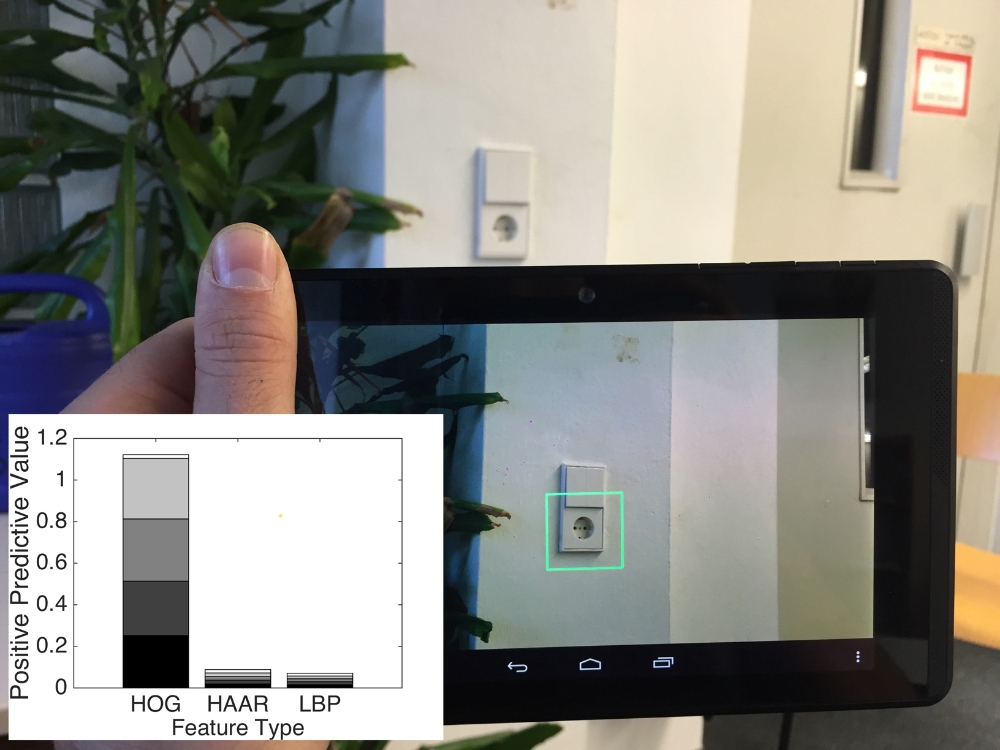
Der Vergleich der verschiedenen Verfahren ergab, dass sich nur der HOG Deskriptor in Kombination mit dem Cascade Classifier für eine Anwendung eignet [Abb. 3]. Außerdem ließ sich durch die Untersuchung feststellen, dass sich Steckdosen durch ihre Zweidimensionalität und die eindeutige geometrische Form leichter mit den gewählten Methoden erkennen lassen. Eine erste Implementierung auf dem Tablet lieferte vielversprechende Ergebnisse. Da Türklinken durch ihre räumliche Beschaffenheit und die vielen existierenden Formen schwerer zu klassifizieren sind, konnte festgestellt werden, dass sich die hier untersuchten Verfahren nur bedingt zu einer automatisierten Erkennung eignen.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter