Wen-Ning Tsao
Semantbasierte Klassifikation von 3D-Punktwolken
Dauer: 6 Monate
Fertigstellung: Juli 2021
Betreuer: MSc Michael Kölle, Dr.-Ing. Volker Walter
Examiner: Prof. Dr.-Ing. Uwe Sörgel
Motivation und Zielsetzung
Punktwolken nehmen eine bedeutungsvolle Rolle in verschiedenen Bereichen des Vermessungswesens ein und werden durch ihre Beliebtheit immer mehr zum Standardtyp, der für die Produktion von digitalen Geländemodellen, Stadtplänen und 3D-Städte- bzw. Landschaftsmodellen zuständig ist. Für die Gewinnung relevanter Geoinformationen aus einer 3D-Punktwolke ist eine optimale Klassifikation entscheidend, jedoch wird diese mit steigenden Datenmengen und Anforderungen an die Genauigkeit immer komplexer. Die entwickelten Klassifikationsmethoden können in punktbasiert und segmentbasiert eingeteilt werden. Bei einer punktbasierten Klassifikation wird anhand von Merkmalen jedem einzelnen Punkt eine Klasse zugeteilt. Die segmentbasierte Klassifikation konzentriert sich auf die Segmentierung. Nach dieser Methode sollten alle Punkte, die sich im selben Segment befinden, die gleiche Klasse besitzen. Eine passende Vorsegmentierung der Punktwolke soll dabei die Klassifikation unterstützen. Mit Hilfe von geeigneten Herangehensweisen und Merkmalen können die komplexen Objekte der urbanen Szenen effektiv segmentiert werden. Die zwei untersuchten Testgebiete befinden sich in Vaihingen/Enz und Hessigheim.
Vorgehensweise
Der Datensatz wird mit CloudCompare für die weiteren Schritte vorbereitet, indem geometrische Merkmale wie Planarität, Krümmungsänderung und Normalvektoren generiert werden. Zum Vorbereiten der Segmentierung wird zuerst ein Parameter berechnet, welcher die geometrischen Merkmale miteinander kombiniert und als Hauptkriterium während des Segmentierungsschritts eingesetzt wird. Die Segmentierung erfolgt hauptsächlich durch einen Region Growing-Teil, dabei wird die Oberfläche Punkt für Punkt überprüft, ob dieser anhand festgelegter Kriterien mit den vorherigen Punkten ein Segment bilden kann. Diese Kriterien sind maximale Distanz, maximale Höhendifferenz, maximale geometrische Differenz und Mindestgröße der Segmente. Die Segmentierung wird in mehreren Segmentierungsschritten aufgeteilt. Zuallererst wird die 3D-Punktwolke nach Reflektanz segmentiert, wobei hauptsächlich Straßenobjekte bearbeitet werden. In der zweiten Segmentierung werden relevante RGB-Werte verwendet, welche Vegetationspunkte gut identifizieren und darstellen. Die letzten Segmentierungen betreffen die restlichen und ungelabelten Punkten, welche noch keinem Segment zugeordnet wurden. Zur visuellen Veranschaulichung in CloudCompare werden die Segmente mit RGB-Werten versehen.
Für die Klassifikation wird ein Random-Forest-Klassifikator eingesetzt. Dieser berechnet für jede Instanz einen Merkmalsvektor und prädiziert eine Klasse. Um die erzeugten Segmente effizient zu nutzen, werden zwei Ansätze für die Klassifikation untersucht: punktbasierte Klassifikationsergebnisse mit nachfolgender segmentbasierter Glättung und segmentbasierte Klassifikation mit Berechnung des mittleren Merkmalvektors.
Auswertung und Fazit
Die in dieser Arbeit erzielten Segmentierungsergebnisse wurden mit den Referenzdaten der 3D-Punktwolke verglichen. Dabei stellte sich heraus, dass 81% (Vaihingen/Enz) bzw. 74,1% (Hessigheim) der Segmente zu 90-100% mit der Referenzklasse übereinstimmen. Die Ergebnisse der punktbasierten Klassifikation dienten als Referenz und wurden mit den segmentbasierten Ergebnissen verglichen.
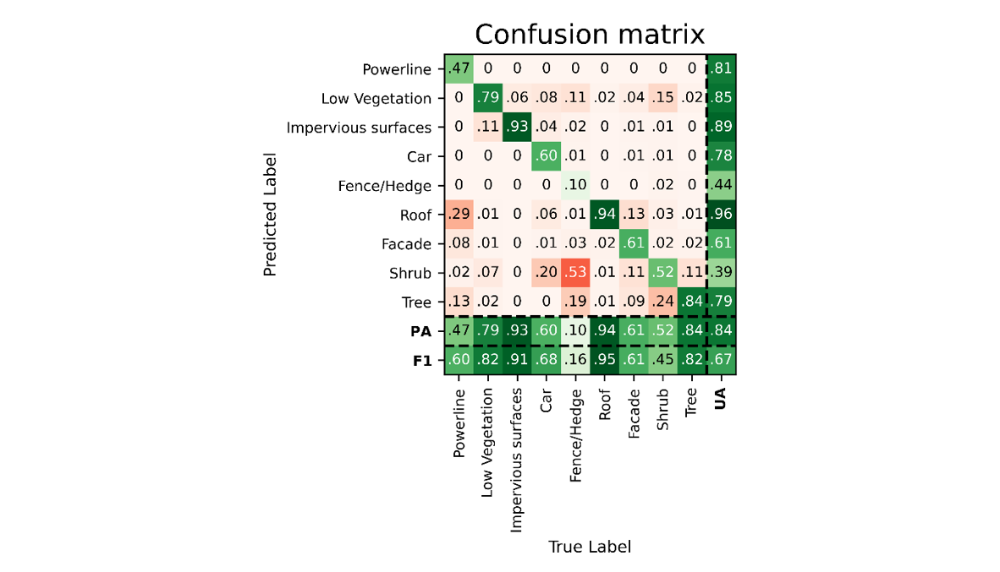
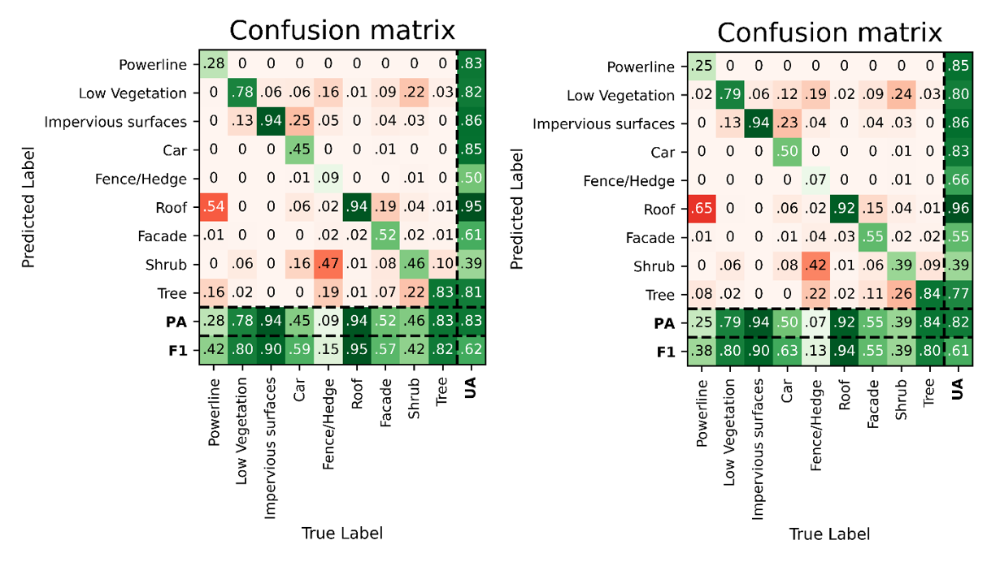
Der Random-Forest-Klassifikator erreicht bei der punktbasierten Klassifikation eine Gesamtgenauigkeit von 67%, was bei der segmentbasierten Glättung und segmentbasierten Klassifikation deutlich schlechter ausfällt (siehe Abbildung 2 und 3). Jedoch kann aus den Konfusionsmatrizen entnommen werden, dass bei einfachen Klassen wie niedrige Vegetation, versiegelte Flächen, Dach und Baum eine ähnliche Genauigkeit erzielt werden kann. Ähnliche Feststellungen und Ergebnisse ergaben sich beim Hessigheim-Datensatz. Die Gesamtgenauigkeit der punktbasierten Klassifikation beträgt 73%, welche die Genauigkeit der segmentbasierten Ansätze (Segmentbasierte Glättung: 70%, segmentbasierte Klassifikation 67%) ebenfalls übertrifft. Beide Testgebiete enthalten Objekte, welche sich in der lokalen Nachbarschaft befinden und geometrisch beinahe identisch sind. Die schwierige Trennung zwischen diesen Objekten verschlechtert daraufhin die Klassifikationsergebnisse.
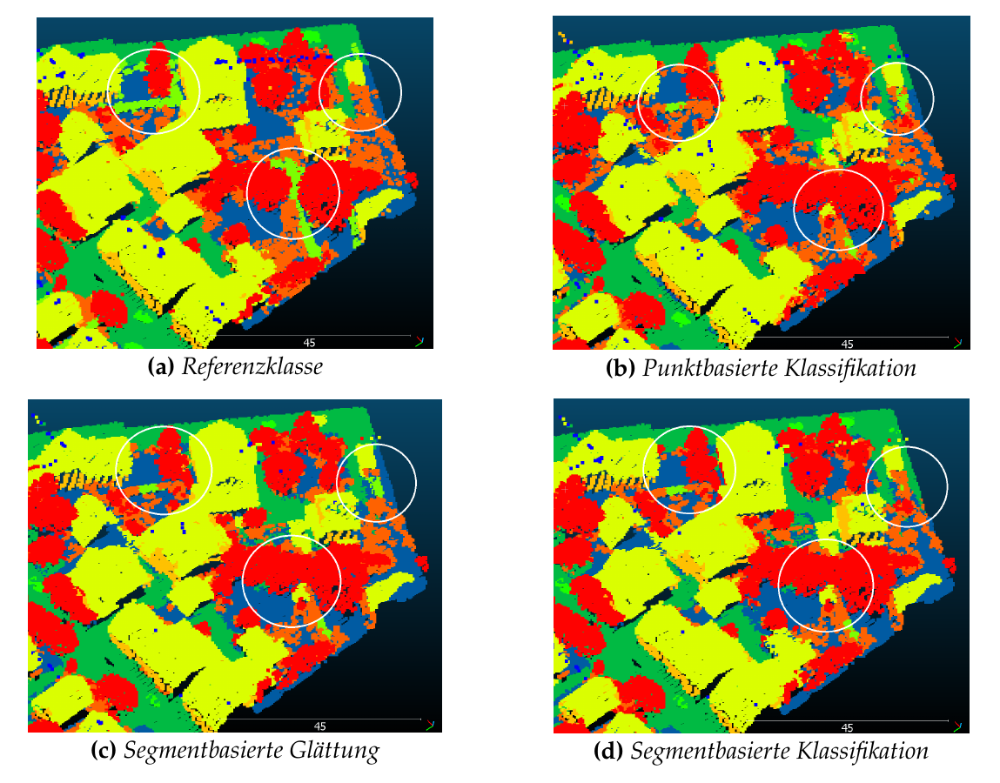
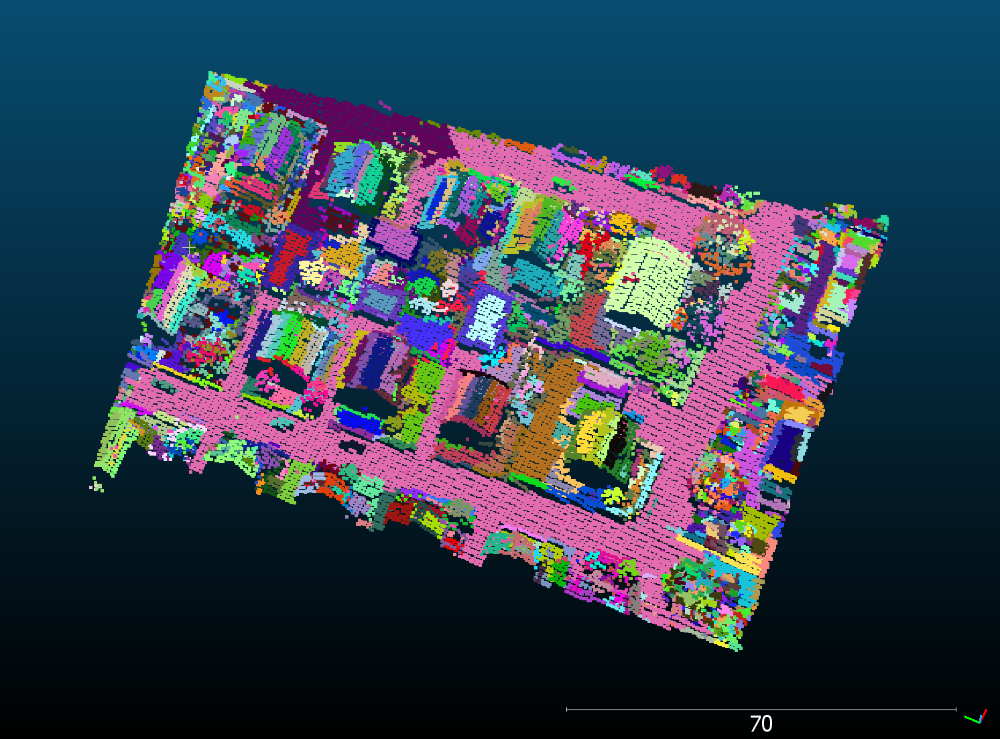
In Abbildung 4 wird ein Negativbeispiel dargestellt, in dem die Schwierigkeit der Trennung zwischen den Klassen Baum (rot), Gebüsch (orange) und Zaun (hellgrün) zu sehen ist. Da die Klassen bereits in den punktbasierten Ergebnissen kaum erkannt oder falsch zugeordnet werden, liegt die Vermutung nahe, dass diese Fehlklassifikationen durch den Random-Forest-Klassifikator verursacht wurden.
Anhand der entstandenen Ergebnisse nach der segmentbasierten Klassifikation bzw. Glättung ist eine Verschlechterung der Genauigkeiten einiger Klassen zu interpretieren, welche eng mit der Qualität der Segmentierung zusammenhängt. Nach der Evaluation betrifft eine Verbesserung nicht zwangsmäßig die einfachen Klassen, da sie in beiden segmentbasierten Ansätzen ähnliche Genauigkeiten aufweisen, sondern die schwierigeren Klassen, welche durch ähnliche Geometrie oder radiometrische Merkmale nicht optimal segmentiert werden. Die Ergebnisse dieser Arbeit zeigen ebenfalls, dass der verwendete Random-Forest-Klassifikator Schwierigkeiten bei der Klassifizierung einiger Klassen aufweist, was die Klassifikationsergebnisse negativ beeinflusste. Der Einsatz eines anderen Klassifikators und weitere Optimierungen bzw. Anpassungen der Segmentierungsparameter können daher in künftigen Forschungen bessere Ergebnisse ermöglichen.
Ansprechpartner

Volker Walter
Dr.-Ing.Gruppenleiter Geoinformatik