
Wenda Jia
Mapping and Localization Based on High Resolution Automotive Radar
Duration of the Thesis: 6 months
Completion: November 2018
Supervisor: MSc. Mingkang Li (Robert Bosch GmbH)
Examiner: Prof. Dr.-Ing. Norbert Haala
Abstract
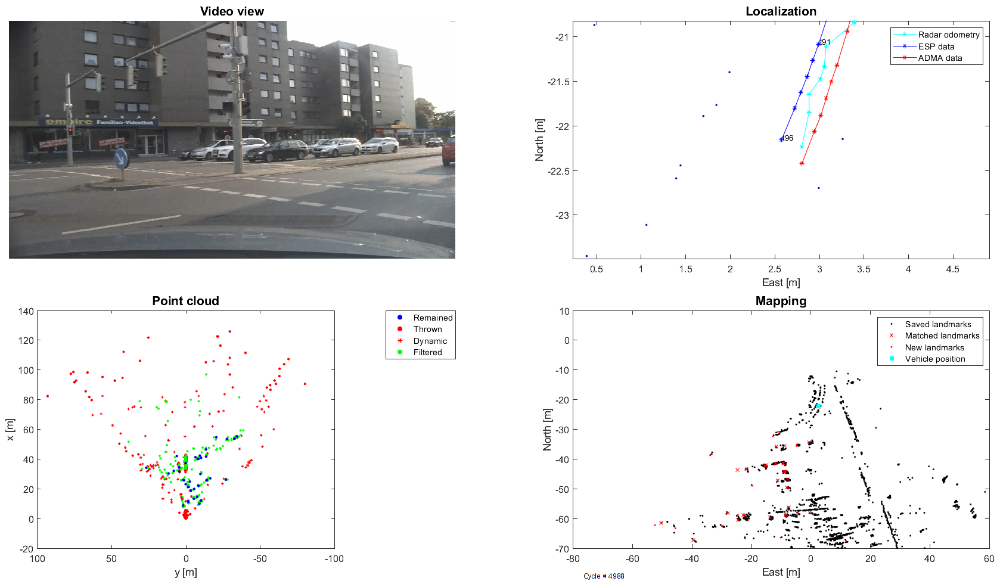
Continuously perceiving the environment to map the surroundings and to get localization of the host vehicle has always been one of the most important tasks of autonomous driving. Therefore, this so-called Simultaneous Localization And Mapping (SLAM) problem became a hot research area in recent years. This thesis uses a brand-new prototype of forward viewing Radar on vehicles that can detect thousands of reflection points, establishes a high-precision surrounding map and utilizes it for localization.
This thesis proposes a SLAM algorithm based on factor graph optimization, Radar SLAM, which uses Radar point cloud to generate neighboring environment model and to get complete static map through multiple driving. The elements of map are feature points of surroundings that are called landmarks. For pose estimation, Radar SLAM not only uses the on-board sensor, but also implements the method of expecting poses only by Radar observations which is called Radar odometry. The methods for data association which are based on point cloud and grid map are also respectively realized in the thesis.
Dozens of experimental data gathered in real world with DGPS positioning results were used to check the established trajectory. The results show that Radar SLAM has an excellent performance.
A complete model of a place can be obtained by merging maps generated from multiple drives through it. Localization in this model based on single shot is defined in the thesis as a half SLAM problem and two solutions for the problem are also discussed in this thesis.

Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter