Kassandra Schwämmle
3D Reconstruction and texturing of the Copán Ruinas (Honduras) site using photogrammetry and LiDAR
Duration of the Thesis: 6 months
Completion: January 2017
Supervisor: Chance M. Coughenour M.A.
Examiner: Prof. Dr.-Ing. Norbert Haala
Introduction
In the last few decades the development of new sensors and methods led to an increasing number of opportunities for science. The possibilities for analysing and displaying various kind of data sets virtually helped also archaeologists in their research. 3d models can be analysed and viewed directly at the computer which makes it easier to work in multinational projects like the MayaArch in Copán from which the data sets were obtained for this work.
Tes thesis was focused on the combined processing of Unmanned Airborne Vehicle (UAV) and panorama imagery in combination with airborne laser scanning data to reconstruct a 3D model of the archaeological site of Copán (Honduras).
Data sets and processing
Before starting the actual processing it needed to be checked which of the panorama images could be included into the processing. For that reason a visibility study was executed. With the help of the Virtual Tour on the MayaArch3D Webpage and a map the line of sight between the single panorama locations were examined. At the end of this pre-processing step five panorama images were chosen for the next step in the workflow.
The UAV and panorama imagery (cylindrical projection) were processed in a combined approach in order to achieve a dense point cloud for a 3D reconstruction. It turned out that a seperated processing of the panorama and the UAV images resulted in a incomplete alignment due to the low number of extracted tie points in the panorama images. Therefore the images were put in one processing project and natural points were measured as constraints for the alignment. All in all 57 manual tie points were measured to secure a stable processing and to prevent the whole block from bulging due to the distortion of the panorama images.
For georeferencing purposes 3D coordinates (X, Y, Z) needed to be interpolated and extracted from a polygon shape files due to the lack of available ground control points. Therefore ten points which were spread over the area of interest were chosen. The georeferenced dense point cloud then needed to be cleaned to be able to generate a 3D model only with the buildings and without vegetation. Hence a classification for the distinction between vegetation and non-vegetation pixels including the training of a suitable classifier was done. After removing the vegetation pixels a 3D model could be generated with Delaunay Triangulation and Poisson Surface Reconstruction which uses the geometric and not the radiometric appearance of the point cloud for reconstructing the surface.
Results and Conclusion
Although the panorama images were mainly used for (touristic) presentation purposes it could be shown that these could be used to improve the completeness of a point cloud and therefore overcome the gaps resulting from dense vegetation at the archaeological site.

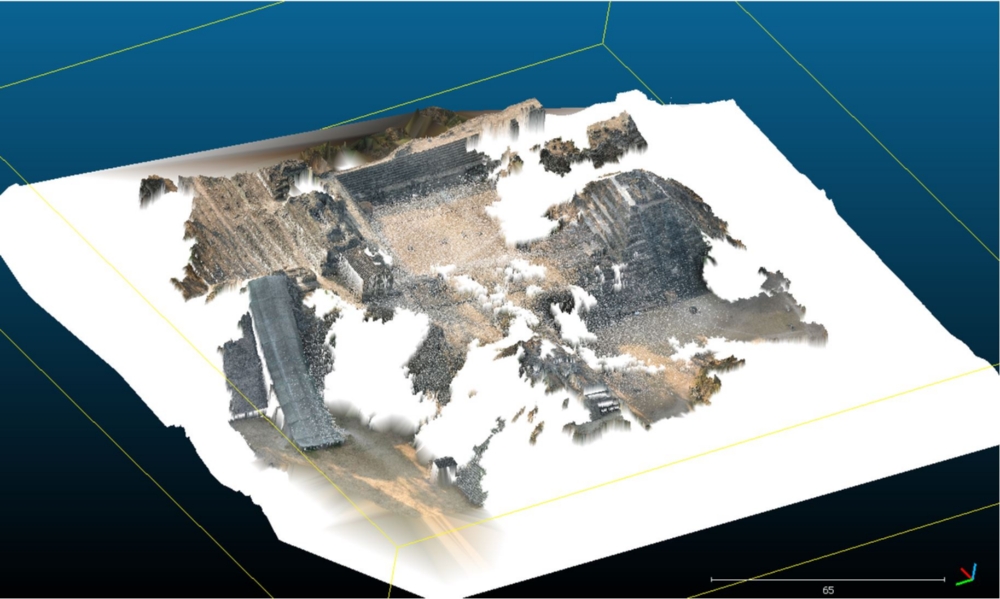
However it could also be shown that the density of the point cloud merged with the laser scanning data was not high enough to fully reconstruct the site and the texture (figure 2).
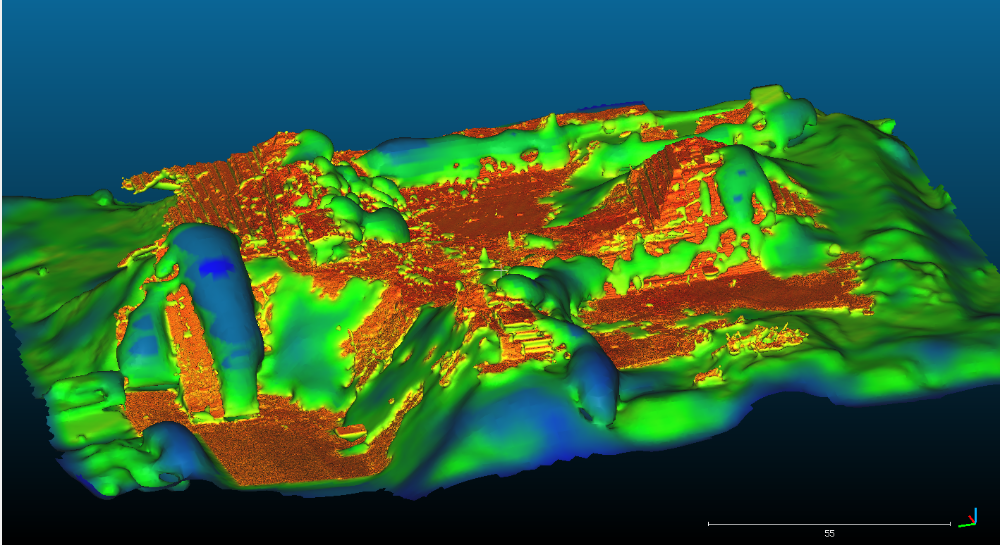
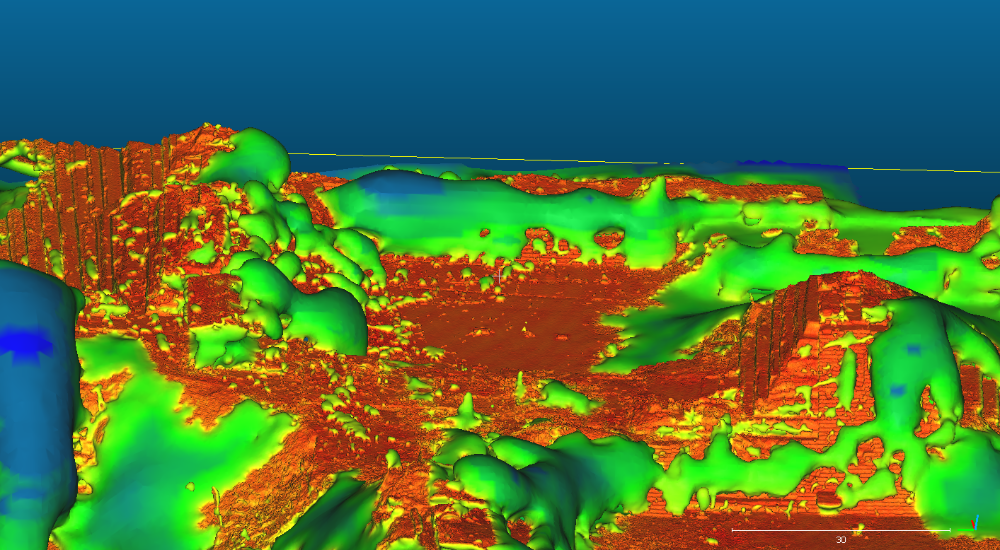
Using the Poisson Surface Reconstruction smaller structures like the pyramid stairways can be better recognised however the bulges still reveal some problems in reconstructing the whole site.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter