
Wei Zhang
Schwarm basierte Lokalisierung auf dem Parkplatz mittels GraphSLAM
Dauer der Arbeit: 5 Monate
Abgabe: Dezember 2016
Betreuer: M. Sc. Frank Schuster, Daimler AG
Prüfer: Prof. Dr.-Ing. Norbert Haala
Mit den technologischen Forschritte und Innovationen ist das autonome Fahren auf dem Weg zu unserem täglichen Leben. Es ist eine viel versprechende Technologie zur Steigerung der Verkehrssichheit und Reduzierung des Verkehrsflusses. Um das autonome Fahren zu erreichen, ist es notwendig, die Lage des Fahrzeugs in einer Karte hoch genau zu bestimmen. Normalerweise befindet der Parkplatz in der Nähe von hoher Gebäuden oder im Innenraum, wo GPS-Signal stark beeinträchtigt wird. Deshalb ist es notwendig, dass das Fahrzeug unter Verwendung der integrierten Sensoren wie Radar und Lidar lokalisiert werden kann. Diese Arbeit präsentiert einen neuartigen Ansatz für die Lokalisierung auf dem Parkplatz.
Das Verfahren basiert auf graph-basiertem SLAM Verfahren. Der GraphSLAM hängt mit der traditionellen geodätischen Kartierung zusammen [1] und hat sich als eine versprechende Methode in Bezug auf die Kartengenauigkeit erwiesen. Das Verfahren besteht aus zwei Schritte: Graph-Konstruktieren und Graph-Optimierung. Zuerst soll ein Graph aufgebaut werden (Siehe Abb. 1). Die Features (Landmarken) werden aus dem Sensor-Scan extrahiert. Für Radar-Scan können die Features wie Ecken mittels des FAST-Detectors extrahiert werden und die lokale Merkmale sind über FREAK-Descriptor beschrieben [3]. Basierend auf der Krümmungsinformationen können die Lidar-Features detektiert werden und die Merkmale sind über einem Polar-Histogram dargestellt.

Nach der Konstruktion des Graphs, das GraphSLAM Problem wird mithilfe der Methode der kleinsten Quadrate gelöst. Die Kostenfunktion is definiert durch die Summe der Quadrate der Abweichungen. Zur Lösung des Minimierungsproblems wird der in [4] implementierte Levenberg-Marquardt-Algorithmus verwendet.
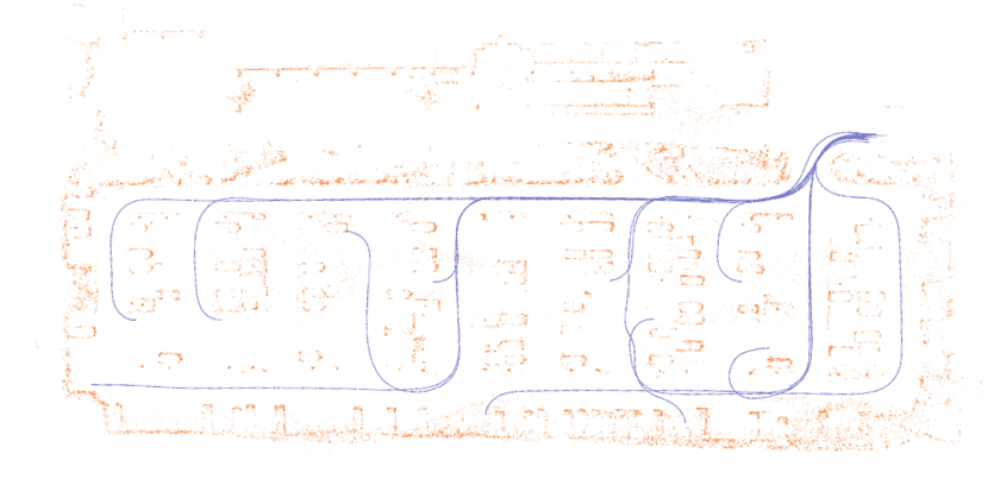
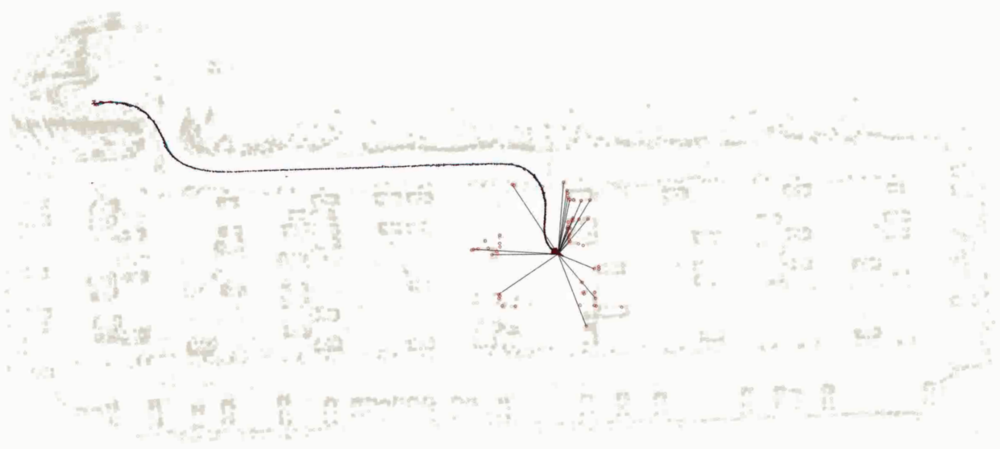
Durch eine Erweiterung zur schwarm basierenden Lokalisierung können mehrere Fahrten registriert werden, um eine hochgenaue und aktuelle Karte zu erstellen. Das experimentelle Ergebnis zeigt, dass mehrere Fahrten über Graphoptimierung präzise registiert werden können (Siehe Abb. 3). Zudem kann der Ansatz die Umgebungsänderungen mit Hilfe von unterschiedlichen Kartentypen effizient modellieren. Basierend auf der registrierten und aktuellen Karte, eine sehr hohe Genauigkeit der Online-Lokalisierung kann mittel des Kalman-Filter erreicht werden (Siehe Abb. 4).

Literaturverzeichnis
1] P. Agarwal, W. Burgard und C. Stachniss. “A survey of geodetic approaches to mapping and the relationship to graph-based slam”, IEEE Robotics & Automation Magazine pp. 63–80.
[2] S. Thrun, W. Burgard und D. Fox. Probabilistic Robotics (Intelligent Robotics and Autonomous Agents), 2005, The MIT Press.
[3] F. Schuster, C.G. Keller, M. Rapp, M. Haueis und C. Curio. “Landmark based Radar SLAM Using Graph Optimization”, Intelligent Transportation Systems (ITSC), 2016 IEEE 19th International Conference.
[4] R. Kümmerle, G. Grisetti, H. Strasdat, K. Konolige, und W. Burgard. “G2o: A general framework for graph optimization,” in Robotics and Automation (ICRA), 2011 IEEE International Conference on, May 2011.
Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter