Lena Joachim
Potenzial von 3D-Punktwolken-basierter Unkrauterkennung in Mais
Dauer der Arbeit: 4 Monate
Abschluss: November 2017
Betreuer: Dipl.-Ing. David Reiser
Prüfer: Prof. Dr.-Ing. Norbert Haala
Motivation
Die Landwirtschaft muss in der heutigen Zeit immer effizienter und gleichzeitig nachhaltiger arbeiten, um mit Herausforderungen wie knapper werdenden Ressourcen und einer wachsenden Weltbevölkerung zurecht zu kommen. Ein Mittel hierzu kann die selektive Unkrautbekämpfung (eine Methode der Präzisionslandwirtschaft) sein, da sie die negativen Umwelteinflüsse herkömmlicher Methoden reduziert, indem sie sie an örtliche Gegebenheiten anpasst. So kann zum Beispiel der Herbizidverbrauch deutlich gesenkt beziehungsweise der Einsatz von Herbiziden überflüssig gemacht werden. Letzteres wäre zum Beispiel bei der Unkrautvernichtung durch Bestrahlung mit Laser der Fall. Die Voraussetzung für diese Methode ist die Kenntnis der 3D-Koordinaten des Wachstumspunktes der Pflanze. Um diese zu ermitteln, ist zunächst eine dreidimensionale Darstellung der Unkräuter nötig, welche zum Beispiel durch die Klassifikation des Unkrautes in 3D-Punktwolken erzeugt werden könnte. Das Potenzial einer solchen 3D-Punktwolken-basierten Unkrauterkennung soll in dieser Arbeit evaluiert werden.
Vorgehensweise
Im Rahmen der Arbeit wurden drei Realisierungen eines Unkraut-Klassifikators entwickelt.
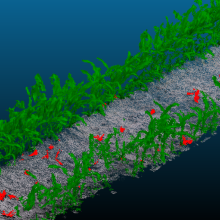
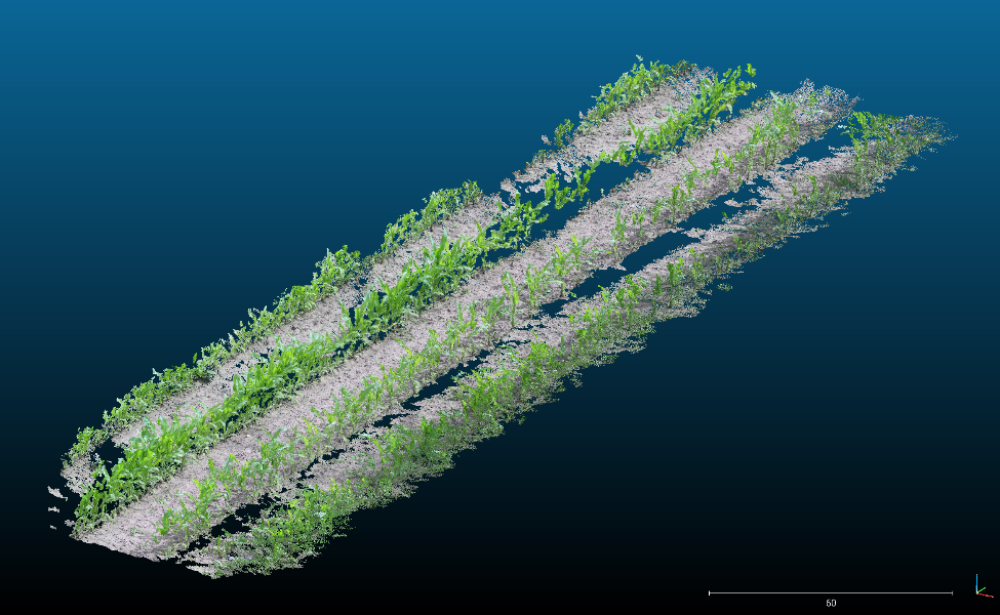
Ausgangspunkt für die Klassifikation ist eine photogrammetrisch erzeugte Punktwolke eines Maisfeldes (Abbildung 1). Der in Abbildung 2 dargestellte Ausschnitt dieser Punktwolke wurde manuell klassifiziert und dient somit als Referenz. Die erforderlichen Trainingsdaten für die drei Klassen Unkraut, Mais und Boden wurden aus der übrigen Punktwolke extrahiert.

Für jede der drei Realisierungen erfolgt zunächst die Definition der Merkmale, dann die Wahl eines passenden Klassifikationsverfahrens und anschließend das Training des Klassifikators. Dieser wird dann auf die Referenzpunktwolke angewandt, wodurch die Ergebnisse verglichen werden können.
Die erste Realisierung erfolgt mit der Software CANUPO, die speziell zur Klassifikation von Naturszenen in 3D-Punktwolken entwickelt wurde. Sie verwendet das Merkmal multiscale dimensionality, das die Dimensionalität (= geometrische Verteilung) der Nachbarschaft eines Punktes anhand von verschieden großen Nachbarschaftskugeln beschreibt. Aufgrund des in der Software implementierten binären Klassifikationsverfahrens erfolgt die Klassifikation der Punktwolke in zwei Schritten: 1. Klassifikation in die Klassen Boden und Vegetation, 2. Klassifikation der Klasse Vegetation in Unkraut und Mais.
Die zweite Realisierung ist nach dem gleichen Schema aufgebaut, jedoch mit nur einem Merkmal pro Schritt. Für den ersten Klassifikationsschritt ist dies ein Farbindex, der beschreibt, wie grün ein Punkt ist, und für den zweiten Schritt die Anzahl der Nachbarn eines Punktes in einem gewissen Radius. Die Klassifikation erfolgt anhand von Schwellwerten, es ergibt sich also ein zweistufiger Entscheidungsbaum.
Für die dritte Realisierung werden die Merkmale aus den ersten beiden Realisierungen mit weiteren Merkmalen, wie zum Beispiel der Pflanzenhöhe, kombiniert, um die Vorteile beider Versionen zu nutzen. Die Klassifikation erfolgt hier mit einer Support Vector Machine.
Ergebnisse und Fazit
Die Darstellung der Ergebnisse der Klassifikation der Referenzpunktwolke mit den drei Klassifikator-Versionen zeigt, dass das mit Abstand beste Ergebnis mit der dritten Realisierung erzielt wird. Mit ihr wird eine User’s Accuracy von 80,4% und eine pflanzenbezogene Producer’s Accuracy von 69,4% für die Klasse Unkraut erreicht (letztere gibt den Anteil an erkannten Unkrautpflanzen statt -punkten an). Besonders eine hohe User’s Accuracy ist für die Anwendung der Unkrautvernichtung wichtig, da zum Beispiel Maispunkte in der Unkrautklasse zu einer Vernichtung des Maises führen würden. Wie auf der Darstellung des Klassifikationsergebnisses jedoch zu erkennen, wurde das Unkraut sehr sauber erkannt, es befindet sich kein Mais in der Unkrautklasse.
Die Ergebnisse zeigen, dass die Unkrauterkennung in 3D-Punktwolken definitiv Potenzial hat. Für eine reale Anwendung eines solchen Klassifikators müssen jedoch noch Verbesserungen bezüglich der Generalisierbarkeit und der Rechenzeit der Merkmalsberechnungen unternommen werden.

Ansprechpartner

Norbert Haala
apl. Prof. Dr.-Ing.Stellvertretender Institutsleiter